I need some help to analyze the attached logs. Please… to avoid another such crashed
Finally I have brutally crashed my wing yesterday. I have been flying this wing over 6 months and never had any issue.
Issue:
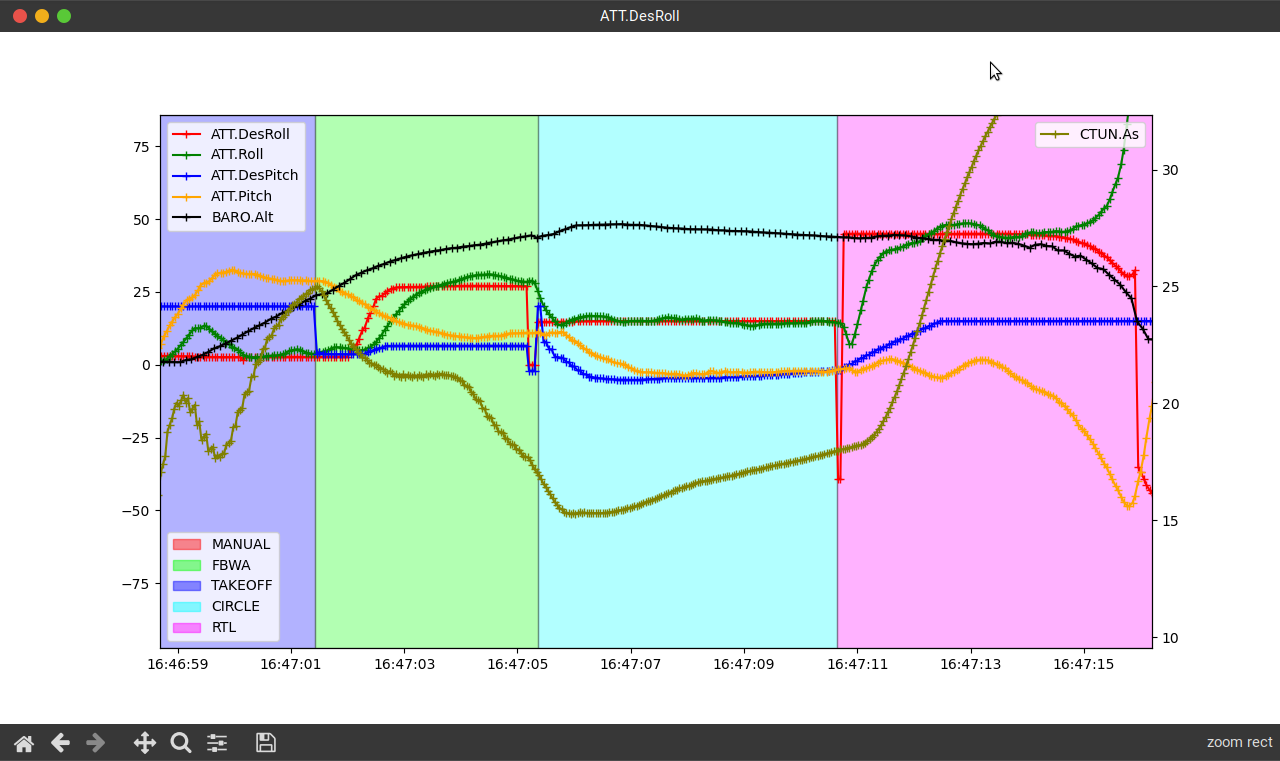
After auto-takeoff. Approx within 20 sec/30 meters high, i have lost the RX signal and plane goes in full throttle( probably RTH), elevator full up and looping in pitch direction. After 3 loops, finally it hits the ground ( wet land) and rest left as shown in attached pic. It should RTH circle (roll) but didn’t, instead it seems it circle in pitch.
RTH tested many times and never had any issue.
More Info:
Few weeks ago, i did updated the Arduplane version to 4.2.3 + update the open tx to the latest one + enable logging save on TX ( open TX).
Since then very often, Yappu app plays sound " Telemetry lost" where connection to the receiver is well established. I didn’t took it seriously as it always comes back after 5-10 sec( it did happened during flight many times) and i thought must be tiny bug in open tx.
A day before the crash I have also noticed on the OSD, very often there was a random telemetry update delay on the screen. Upon increasing the throttle no changes in amps.
System Info:
Aircraft: FX79 Wing
Matek f765 WSE
Matek M8Q 5883 GPS
Sunny SKY 3520 III, 13 x 8 props
Ardupilot 4.2.3
80amp Iflight ESC
FPV: DJI
I’m wondering if there was a power failure/issue. The plane is not reacting according to the demanded pitch and attitudes, even though it had been before the radio failsafe. I suspect that maybe the power to the RX and servos was compromised at the same time. The current draw at the same time goes way above even what was needed for take-off.
I’ll have a closer look at the logs again tonight and see if anything else comes to mind.
I don’t think this is an ArduPlane issue. Shortly after take-off the plane was switched to FBWA. It was a few seconds later the radio link was lost and RC failsafe triggered. The plane went into circle mode and by all measures was performing normally (except for the radio failsafe). When the Long failsafe triggers the plane goes into RTL. Throttle goes up and the plane is supposed to climb to your RTL height (100m). At this point is when things go really bad. The FC is requesting the climb and turn as it should however the plane is not responding as expected. The servo outputs are still sending signals to the servos. What is impossible for me to tell is if the servos are getting the signals or if they are functional. The throttle is going up because the plane is expecting to be in a climb.
Experience suggests to me it is unlikely that the RC fail safe, and the plane not responding to control inputs are not unrelated. That’s why I suggested earlier it was a power issue. Especially if the servos and the RX are powered off the same bus. Another option could be if the C of G moved. For example the battery came loose. This might not directly explain the RX issue and could just be a chain of events. However a C of G change could explain the pitch and roll oscillations. Once the C of G goes out of limits the plane is just fighting to stay in the air.
Strange very strange. Naa battery was very secured. As you can see in attached pic after crash battery came out and breaks the plane right from where it was secured.
CG was perfect.
Dammm. Unless servo gave up at very right moment. + now I remember day before the crash, I was trying to fly in manual and aircraft try to pitch down and sometime up, it was very unstable flying, I thought cg was off or trim is too bad, so I landed after 10 min of flying, but it was ok In fbwa so I thought may be trim.
What do you recommend based on your experience ? More likely servo or Matek controller.
Servo I am using not very expensive ones it’s EMAX 3kg pull. At the buying those servo I also bought Savox but decided to use EMAX as wing is slow flyer.
I haven’t got a chance to test the servo yet I will do it today. May be servo gave up.
I just finished checking the servos and both servos are working absolutely fine.
I will still change the servo on new one. More, previously when I mentioned I have tested the RTH many times, I tested it by changing the mode on the transmitter while around 80-90 meter Alt. I have never tested by turning off the transmitter.
Does ARDU process losing signal RTH differently compared to changing mode from TX.
Sorry Alistair to be a pain. Don’t want I or anyone face this issue or happened again on maiden flight on new aircraft.
Where I can find settings not to climb when RTH kicks in or is there any settings only climb if terrain data is available on SD and only climb if required ELSE circle and RTH at same ALT where it kicks in.