There was a fickleness in the imu on a flight , I would also like to have an opinion on the PIDs acquired by Autotune, if they were satisfactory
Pix cube
Arduplane 3.9.4
Rvjet wing 1,95m
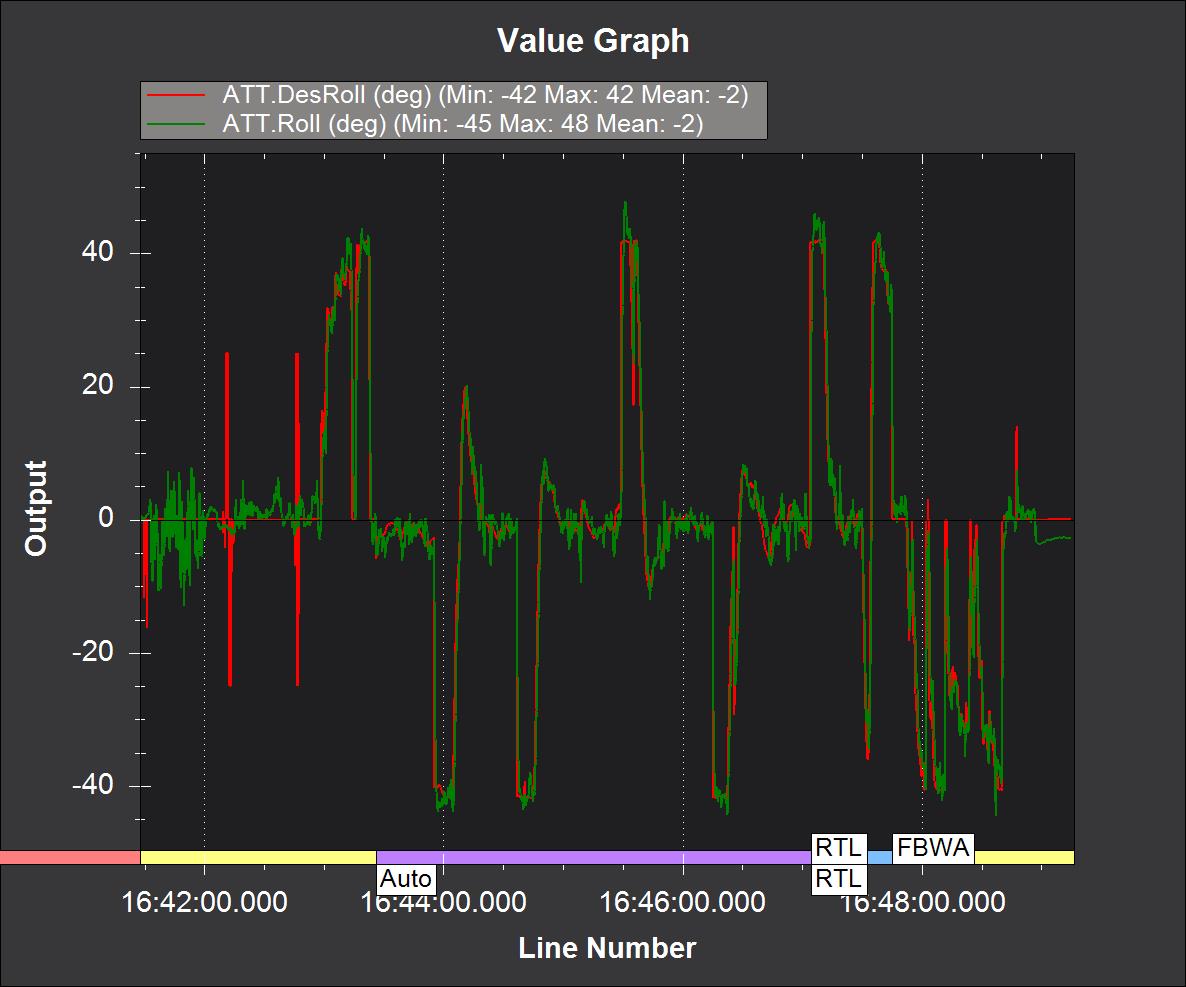
I found that the plane went beyond the maximum angle of the scroll, it was adjusted to 42 and there were cases of reaching 48, I think this can be coming from the pids, flight with little wind, I would like an opinion about the pid configured by autotune , another thing, an imu error occurred on a flight, recalibrated the accelerometer after that, I could not test again for the reason of wind. thanks
I think occasionally overshooting roll by up to 6 deg is excellent performance.
I did not see your autotune flights, but the 6[deg] overshoot seems like an indication of good gain values. I’ll remind you of 2 things:
Further autotuning should only improve performance. So it never hurts to just keep flying autotune missions until the performance stops improving. If memory serves, the docs recommend 20+ autotune maneuvers. This means 20+ hard-left-turns, 20+ hard-right-turns, 20+ hard-pitch-ups, and 20+ hard-pitch-downs. Look at the AUTOTUNE_LEVEL to improve performance more quickly, but be careful with high values.
Autotune is a wonderful system, but if you understand PID control, you can manually tweak the gains for better performance. Sometimes I use Autotune to get the gains close, then carefully adjust the gains manually to get “peak” performance… but usually I’m content with the Autotuned solution.
I’m sorry, I don’t understand. Are you asking why the IMU error occurred? If so, please specify which log (and which flight) you’d like us to look at? It would be even more helpful to tell us how you knew the IMU error occurred, what action you took as a result, and what behavior you observed.