I am new to Autopilot, and now using it for my work, so I must study it a lot. If anyone has a free moment, please help me analysis my copter log. This copter is hexacopter with tarot 680 frame, it has been flown for some mission before without problem. And before this flight, I have change landing gear and gps stand, after that I have done compass & accel calibration.
Having test it in stabilize mode, and everything look fine. Now I tried to autotune it in loiter mode, but before I start autotune, when I fly it to ideal altitude I have seen several weird thing like the copter loss the trust (like falling for a moment before go up again), because of that I’m afraid to do the autotune.
Please help me check the log, and point me where to see the problem. Thank you, sorry for my bad english. Every suggestion is welcome.
My configuration:
Tarot FY680 Hexacopter Frame
Pixhawk 1, load with arducopter 3.5.5
DJI E600 propulsion system (3508 motor 415kv with 12" prop.)
LiPo 6S 5200mah
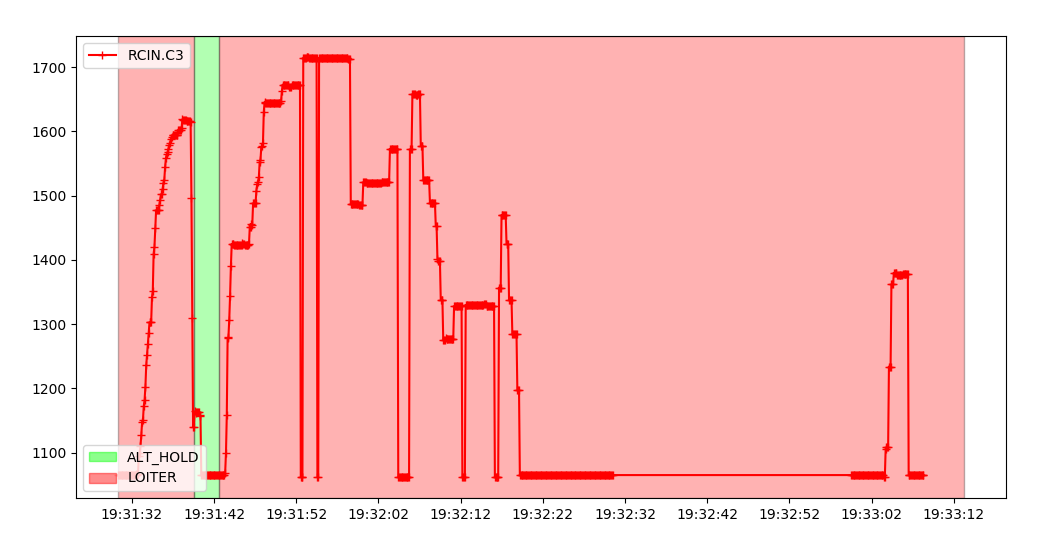
I’m not sure, I’m still learning in this area of autopilot. What might cause of that? Is there anything wrong beside that throttle input? I just panic and try to do full throttle, I haven’t change flight mode from beginning until landing. Can that error happen just in loiter mode because when I fly in stabilize, it fly well except very slow response (I think because not yet tune).
I see several drop in that graph, is that all drop because RC dropout? Because I just see about 2 or 3 times my copter loss height.
Thanks for your help, it’s a lot of new thing to study for me
Hi Mr. Robinson, thanks for your suggestion, what I have read from http://ardupilot.org/copter/docs/autotune.html#autotune tell that "In Copter-3.5 (and higher) AutoTune performs a weak position hold if invoked from Loiter or PosHold flight modes (as opposed to AltHold)."
I’ll change it to poshold mode for autotune after I find out what the cause of problem.
Tommorow I’ll try to fly it with other receiver or maybe another set of remote to make sure it’s not because RC dropouts