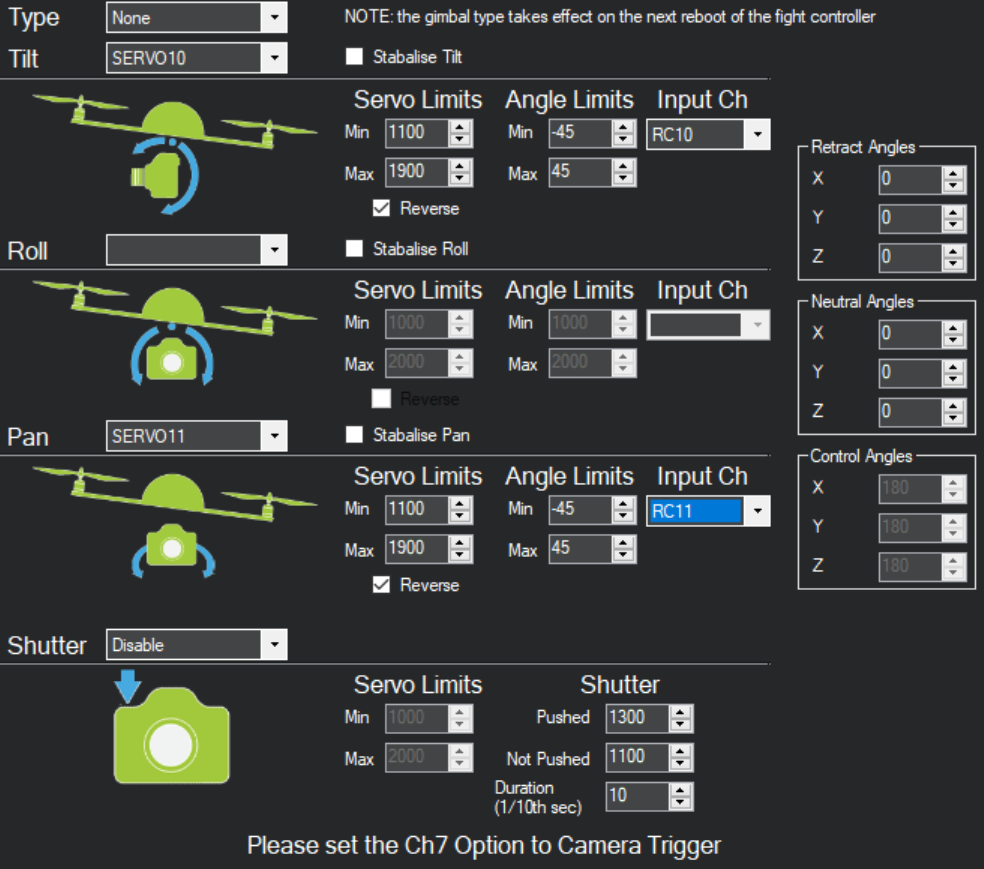
Also, you may need to check the Stabalise boxes if you want the software to point the camera for you. If not, and you just want to control manually, then don’t check the boxes.
But, I am not even able to control the gimbal at all. There is no movement at all when I turn the pots. I’ve also tested for passthrough for the RC10 and RC11 channels, but nothing.
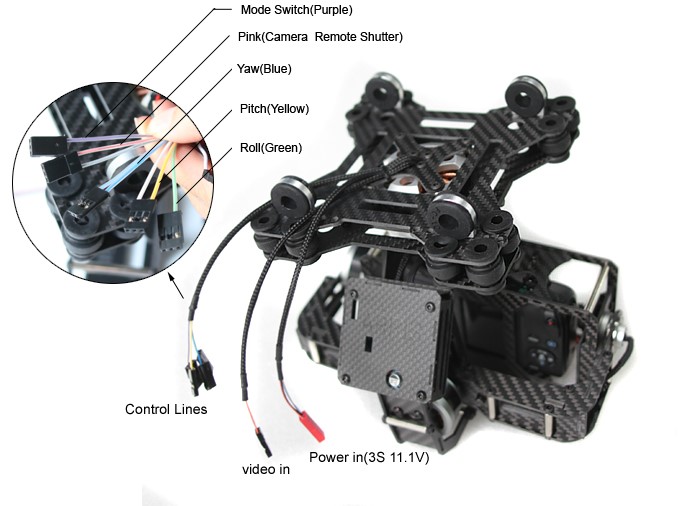
It is just plain servo cables for pitch and yaw from a brushless gimbal (not servo driven). I have no serial connection to the gimbal.
On the Taranis the pots show full range (-100 to +100), and in Mission Planner it shows correctly under Radio Calibration. But whatever setting I use, RC Passthrough, or the settings in the pictures, nothing at all happens, I have no control at all of pitch/yaw with the transmitter.
Thank’s. I will check that further. I’ve done some testing, and what I so far ended up to do, was rebinding my X8R so I could use the ports on the reciever for channel 9 and upwards (1-8 SBUS).
In the Simplebgc software it only saw 2 RC connections (even when having put in all cables and set up mixes on the Taranis), which 1 of them worked. I got Roll to work, and then I changed the Pitch channel to the Roll input, to get Pitch to work.
So, at least Pitch work now, and that is the most important function.
Thank you all for your ideas and help!
Best regards,
Robert
How is the progress? I have the exact same gimbal which I bought second hand and have just connected it up. I bypassed the pixhawk and plugged the pitch roll and yaw channels into a X8R (16 channels).
It works well but found the controller is 8 bit so it must be quite old.
I sort of got it working, at least as good as I need. I will mainly use this rig for testing (perhaps later RTK and lidar) and test mapping. So I mainly need pitch, which I got to work, and trigger I got to work with StratoSnapper 2.
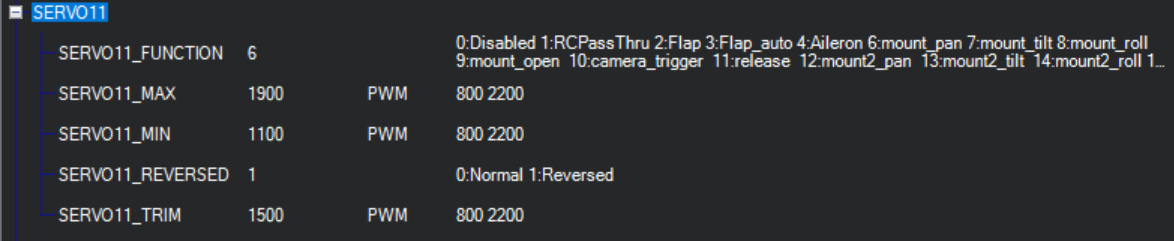
In the BaseCam software I had to set YAW as RC for Pitch(!). I got everything to work after a lot of testing with the servo cables to the Pixhawk, so trigger is setup for Channel 7 in Mission Planner, and Pitch is also setup in Mission Planner.
I haven’t gotten YAW to work. Maybe I have to make some other settings in BaseCam for it to work, or my gimbal is defect.
How is the progress? I have the exact same gimbal which I bought second hand and have just connected it up. I bypassed the pixhawk and plugged the pitch roll and yaw channels into a X8R (16 channels).
It works well but found the controller is 8 bit so it must be quite old.
Sounds good. I tried stratosnapper but found Seagull #REC better
Which I use on another gimbal. The Arris seems very heavy and the cage restricts what camera you can mount.
Have you checked the gimbal of on the GUI? If some of the channels are not working the GUI should show it? I have a profile I can send you if needed?
Thank your for the link to Seagull! It looks better! I’d be very happy if you could send your profile, if it’s not too much trouble for you. It might help me solve the yaw issue.
Seagull #REC - the most affordable and feature rich Sony MULTI camera controller on the market !! Take control over your Sony camera Today !
Which I use on another gimbal. The Arris seems very heavy and the cage restricts what camera you can mount.
Have you checked the gimbal of on the GUI? If some of the channels are not working the GUI should show it? I have a profile I can send you if needed?


{kind=link}
{kind=link}