I have pixhawk with 3.4. RC1. It flies fine for a long perdio of time. Today I start in alt pos mode and imediatelly saw a very bad reaction on joystick. After 15 sec it crashed.
I dont know what happened. After reconnecting battery it flies ok.
Please help me analyzing included log. https://dl.dropboxusercontent.com/u/20802604/2016-08-29%2018-01-59.bin
This is when it crashed. I was not able to maintain altitude.
Auto analysis revealed Large change in mag_field (41.24%).
CHecked the EKF and in Compas column it jumps way over 0,8 when I move quad.
Something is wrong with compass, dont know why…
Kudykam,
Really sorry about your crash. I think you may have uncovered an issue.
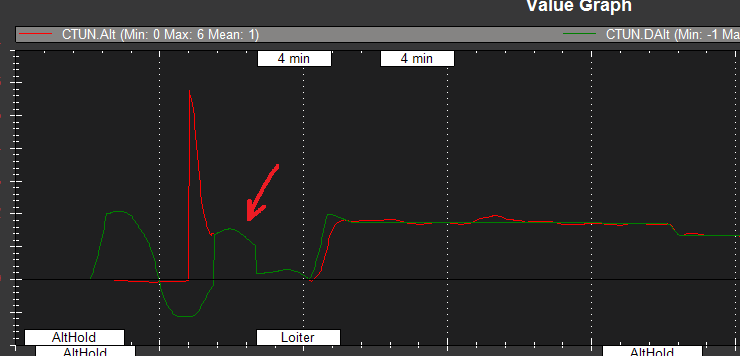
The suspicious bit is that the desired climb rate suddenly drops to -4m/s the moment the EKF decides it’s got a good GPS lock and position (see ORGN messages that appear at line 6023).
There’s another issue in that the CTUN desired altitude and actual altitude don’t match at all until the same moment. I suspect this is just a reporting issue.
I’ve tried just now to reproduce the issue in the simulator and haven’t been able to so I need to investigate more. Until then I’ve added a warning to the -rc3 release thread that people should wait for GPS lock before taking off.
Thanks again for the report and sorry about the troubles.
Ah, this is -rc1!! You mentioned that in your post above but I totally missed that.
Can you upgrade to -rc3? There are enormous number of changes and fixes since -rc1.
-rc1 actually doesn’t include the throttle learning so that can’t be related.