Trying to get rid of the toilet bowl effect on a current build but not having any luck. Tried putting a notch filter on for the rotor head rpm, further PID tuning and turned off the internal mags but still there. 860rpm with 2.3m rotor disk
Running cube black with Here GPS
Would anyone kindly be able to look over the logs at the below onedrive link and give me some feedback on anything else i should try. Many Thanks
@nigel I think the first thing you need to look at is the basic attitude and rate controller tuning. I think they are under tuned. I would like to learn more about the vehicle and the reasoning behind your choices for the shaping parameters.
Obviously this is a pretty big helicopter. What is the takeoff weight? Gas or electric? what collective pitch blade angle does H_COL_MIN and H_COL_MAX correspond to?
The rotor speed you chose is on the lower side from what I’d expect for a rotor diameter of 2.3 meters. I calculated blade tip speeds around 340 ft/s. What is your hovering collective blade pitch angle.
First your ATC_RAT_ACCEL_X_MAX params are pretty low. Have you tested to see how much acceleration your rotor system can produce? Also the tail rotor accel is extremely low. What kind of tail rotor? direct drive with collective pitch or fixed pitch, variable speed?
In my opinion, I think you need to increase your VFF for pitch and roll. Looking at your desired and actual rates, it appears that the actual rates are falling short of the desired ones.
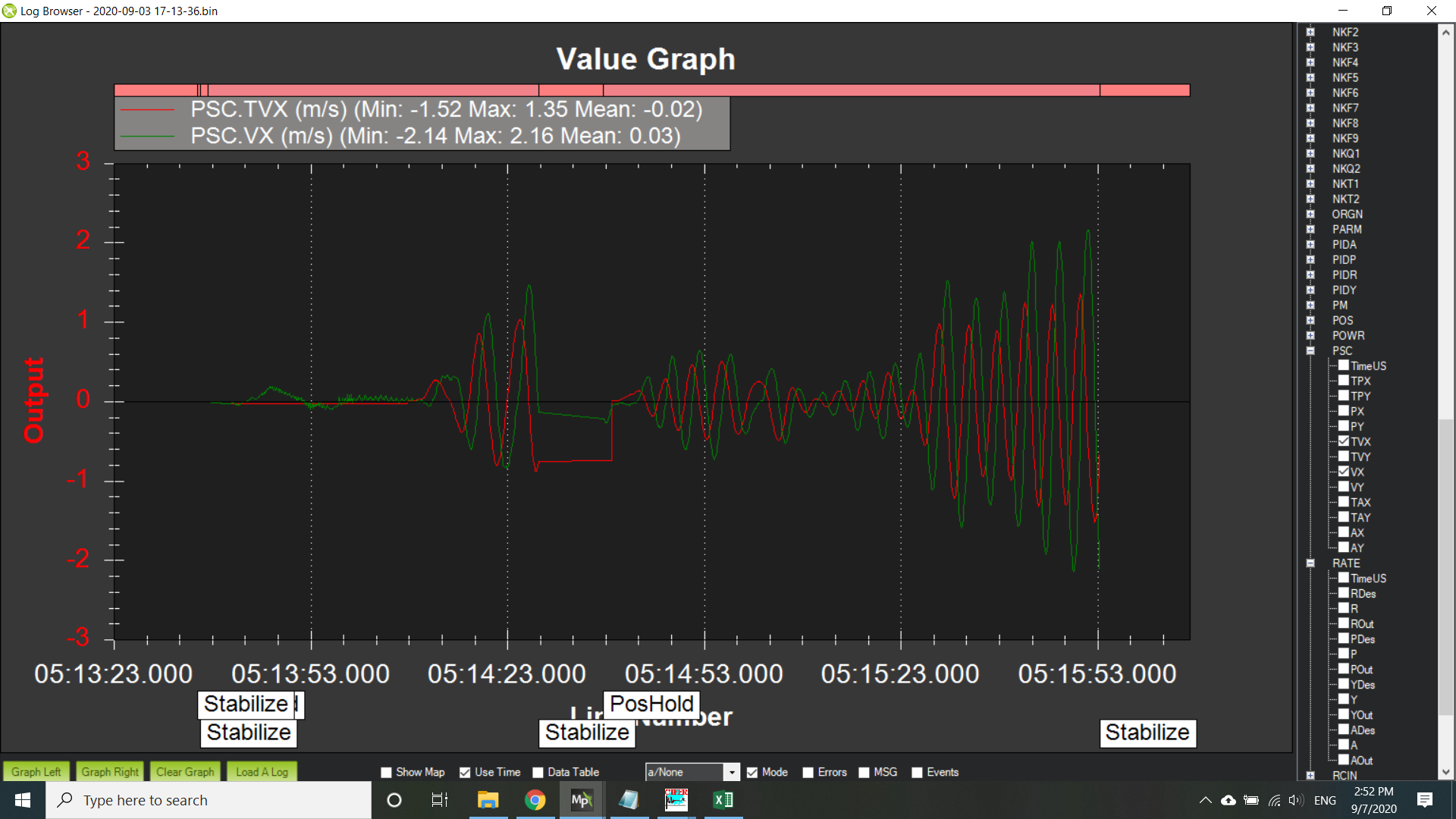
@ZvikaF I think you responded to the wrong thread. You probably wanted to respond to this thread. I have heard that toilet bowl could be due to compass issues however in looking at Nigel’s position controller data, you can see that the actual velocity is out of phase with the desired.
I would think if this was a compass issue, the actual and desired velocities would be in phase and toilet bowl effect would be commanded. I believe Nigel’s issue is due to poor tuning.
What makes you think it is a CG issue? An offset CG (not under mast) would cause the controller to hold more integrator to keep the requested attitude but the controller should not have an issue holding the requested attitude as long as the integrator has enough authority to counter the effects of the CG offset.
For the steady state point, the CG problem will be solved by the integrator, but for the short term it will work like a capacitor and ad a phase change…
@ZvikaF you will have to explain that a little more for me. I’m not an electrical engineer What physically does a un-centered CG do to the helicopter system to “work like capacitor” and cause phase lag in the response.
@bnsgeyer I’m not an electrical engineer either, but looking at a system that oscillates with integral buildup and leaking, dew to C.G-Lift long arm, looks as if the system is building “energy” like capacitor.


 What physically does a un-centered CG do to the helicopter system to “work like capacitor” and cause phase lag in the response.
What physically does a un-centered CG do to the helicopter system to “work like capacitor” and cause phase lag in the response.