This is my first Ardupilot project after having flown traditional RC helicopters for approx. 5 years. I have put many flights on this helicopter using a standard FBL system before I converted it to ardupilot.
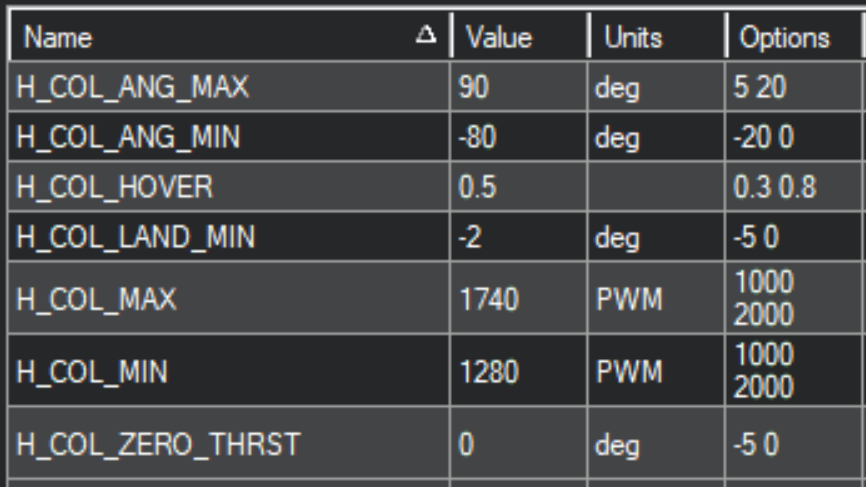
After establishing OK flight performance in Stabilize and Acro Mode, I wanted to get the helicopter to fly in Althold mode. On the bench I made sure the swash plate moved minimally when switching from stabilize to Althold mode. Collective stick position in this bench test was chosen based on previous flights where the helicopter was hovering stable.
H_COL_XXX parameters are shown here:
For the Althold test I let the helicopter climb to an atitude of ~35 m in stabilize mode, then switched to Althold.
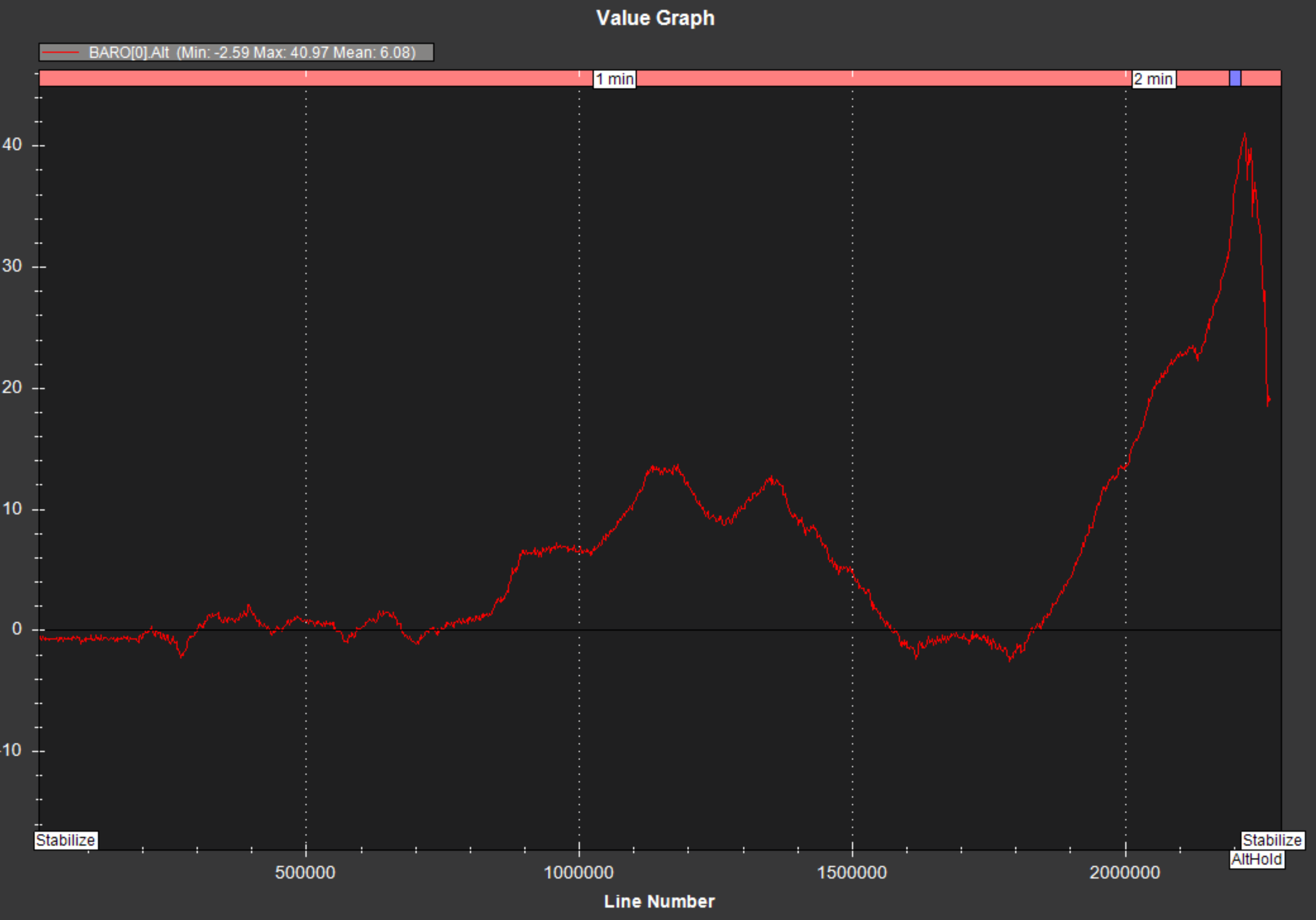
After a short moment the helicopter started rotating (=yawing) rapidly on its own and I switched back into stabilize but could not stop the fast rotations.
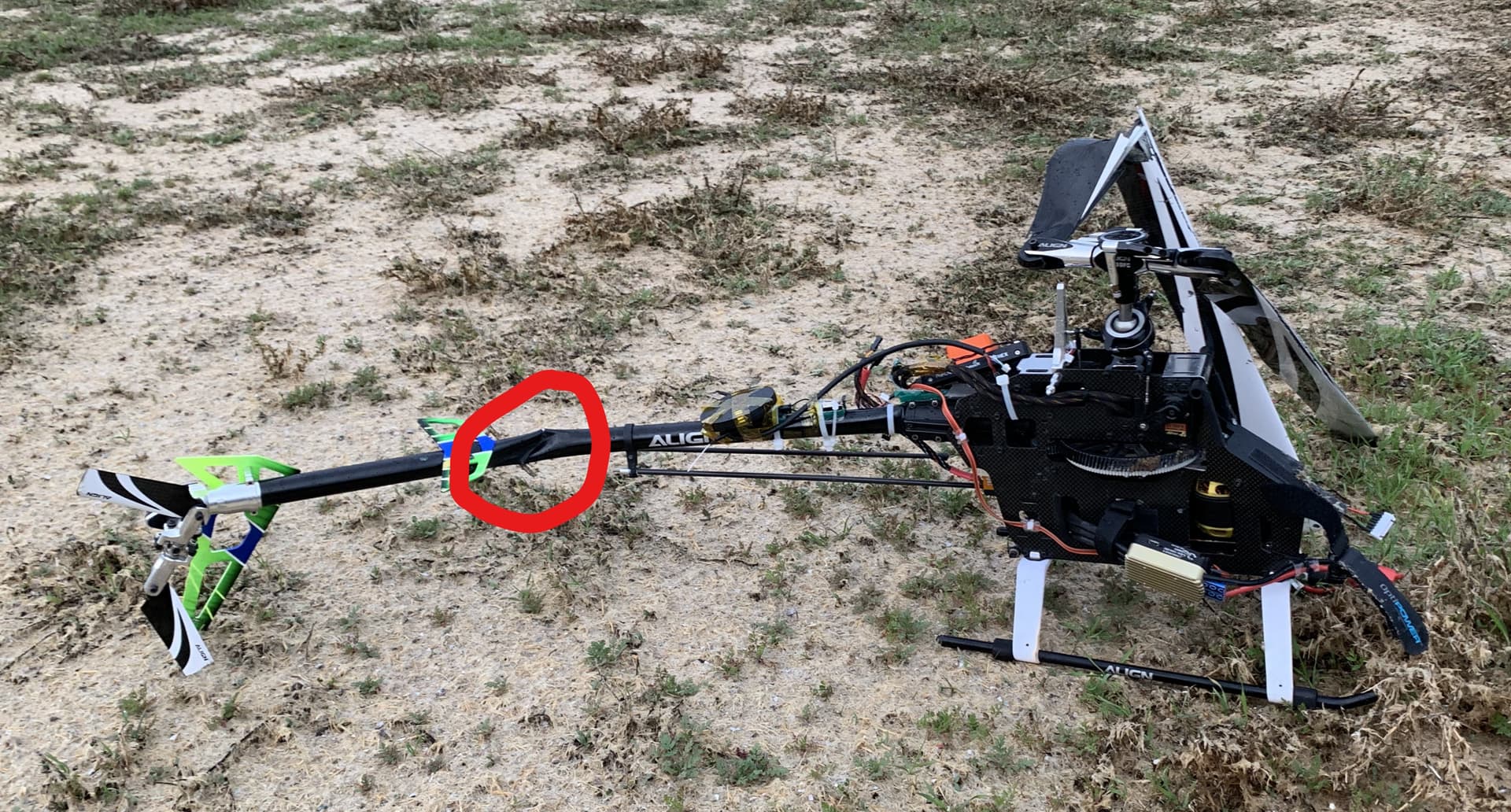
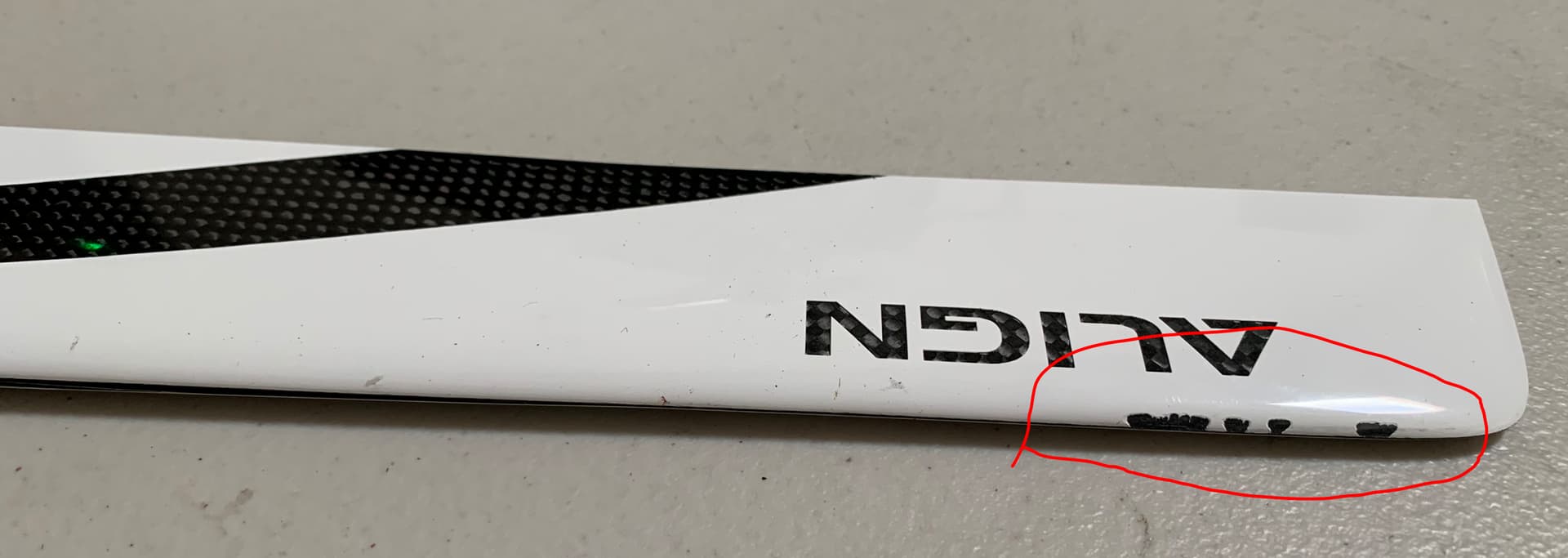
There was a loud ‘bang’ in the air, but I cannot say anymore whether that ‘bang’ happened before or after I switched back into stabilize. I am quite certain the helicopter suffered a massive boom strike and crashed badly.

May be somebody can help me understand what happened. Although this helicopter is totaled, I have another mechanic that I am ready to dedicate to this project, if I can figure out what went wrong.
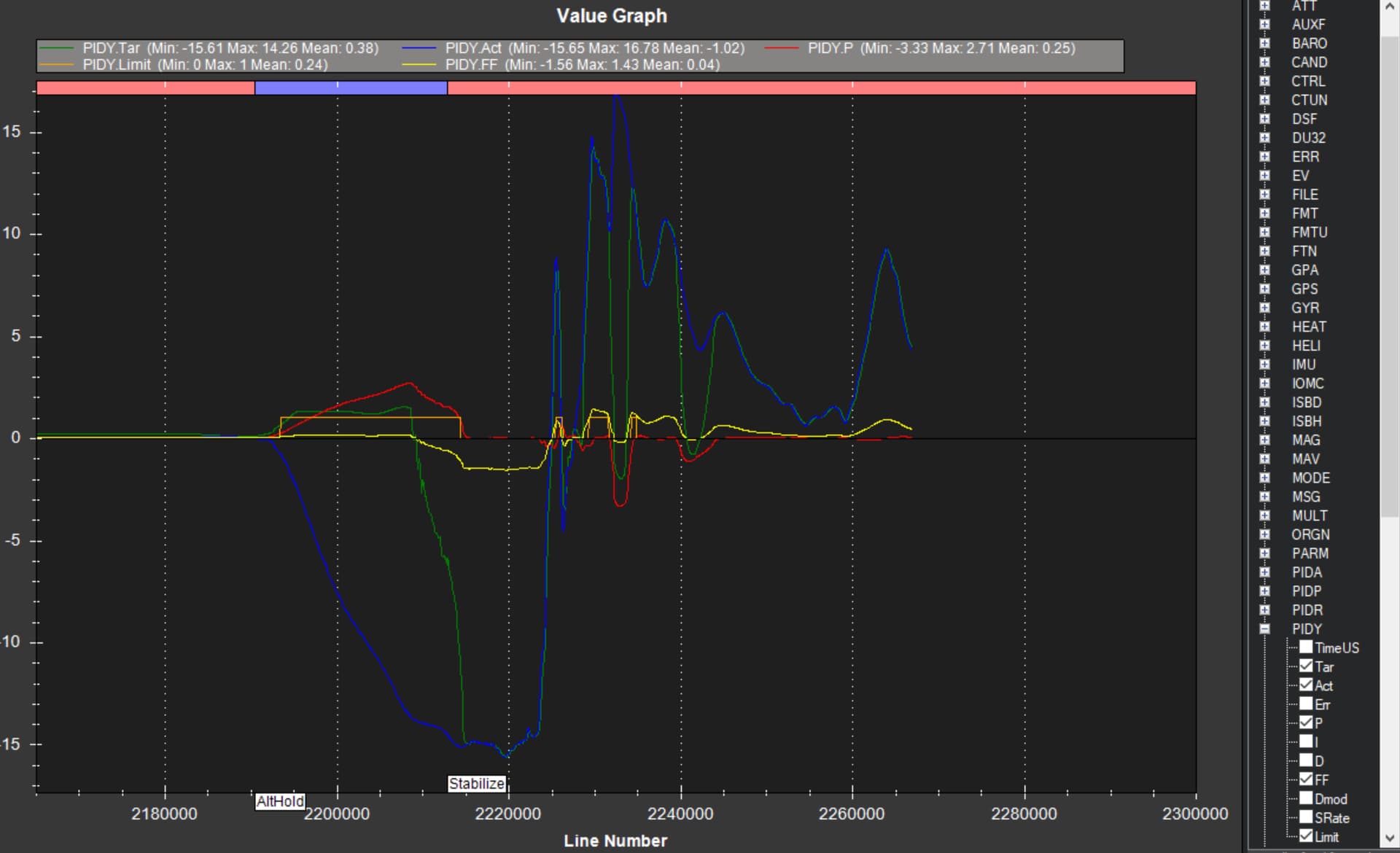
Here is the zoomed in portion of the PIDA parameters from the log file when the heli was in Althold Mode.

I have the complete log file, but it has a size of ~80MB and cannot be posted here. Will upload it if somebody, tells me where and how.
Thank You for any insight, anybody may be able to provide.
This TREX has the 600 boom and is tail heavy. Therefore, PIDP has an offset but apart from that PIDP.T and PIDP.A are tracking albeit with a phase delay.
Setup:
Radio: FrSky Horus
OS: OpenTX-x10express; Vers: 2.3.14-otx
Receiver: FrSky R4 Archer
TREX 550E DFC
CubePilot Orange
Ardupilot V4.3.0
Mission Planner 1.3.79