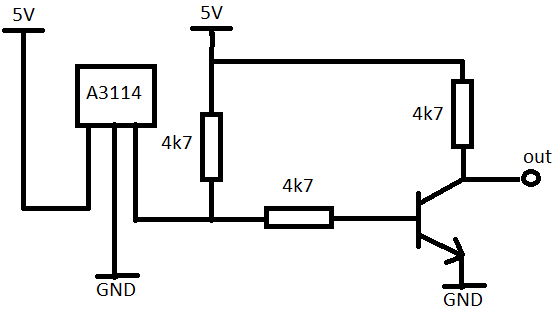
Hi, just tried with GV-1 sensor, GV-1 sensor use analog type sensor, so you need some conversion to use with pixhawk. futaba sensor use different polarization of magnet, I think it North. I’ve made sensor with A3114 hall effect sensor, a couple resistor and transistor for reverse the output from sensor. It working now