Hi all,
I am new to arducopter heli setup and recently installed OmnibusF4V3Pro board on my blade 450 with a flybar.
Did maiden yesterday and everything was fine in stabilized mode.I only tested stabilized mode.
So today i tested again and first 3 flights went okay but on my 4th flight in stabilized mode,helicopter started to roll right and it seemed that i had no control to correct it.So after seeing that it was not responding,I moved my cyclic down to avoid hitting it to my fence and it crashed to the ground
I am attaching log.Could anyone please check my log?Thanks.
@ninja_zx11 I am sorry to hear that you crashed. I apologize for not responding to your previous post. I took a quick look at your log. The first thing I noticed is that you were flying an alpha version of code. You should NEVER load the “latest” code. Always use the version that appears on the install screen in mission planner. This is the most current stable release. So at first glance I cannot determine if this was the cause of your crash.
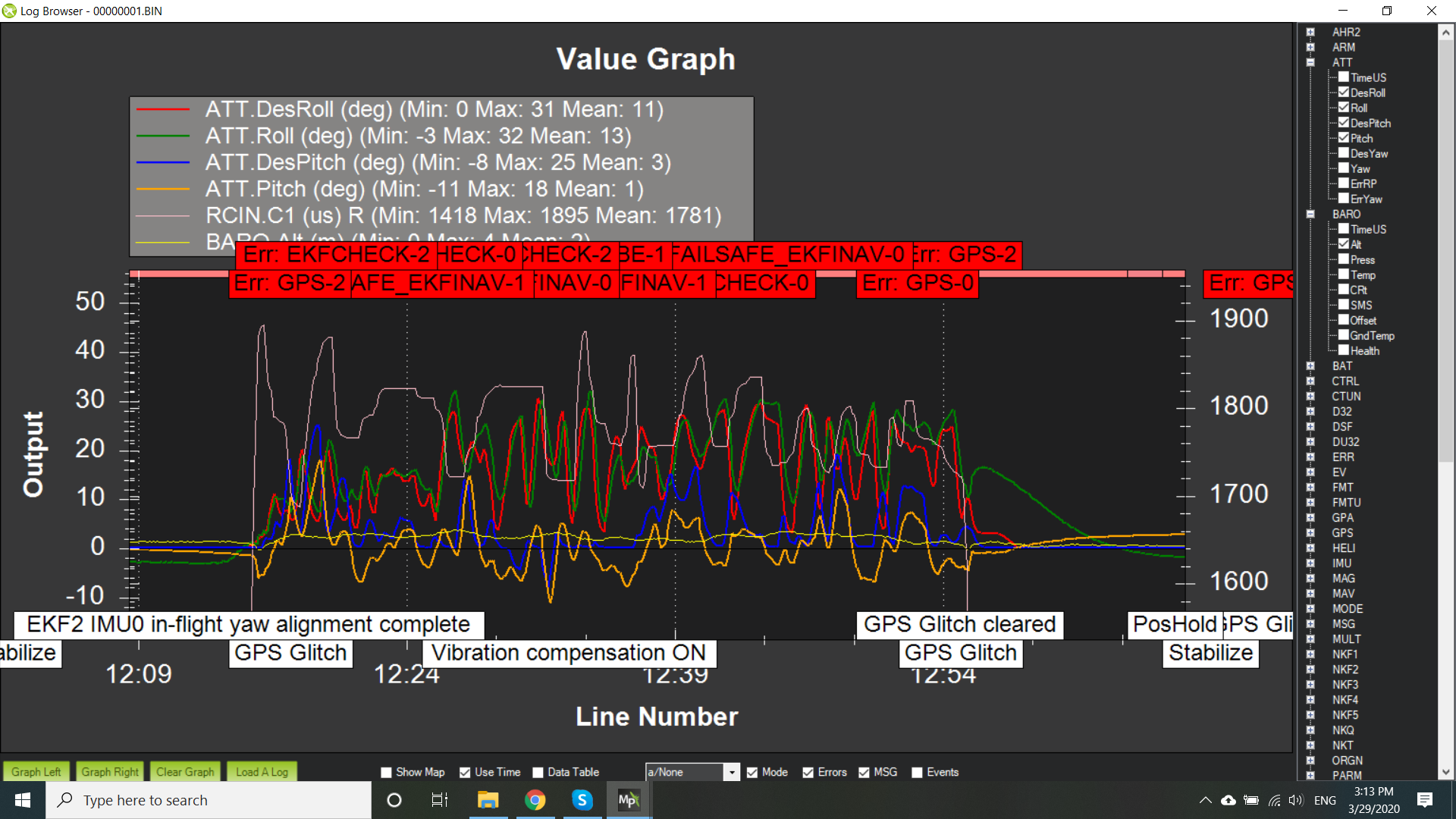
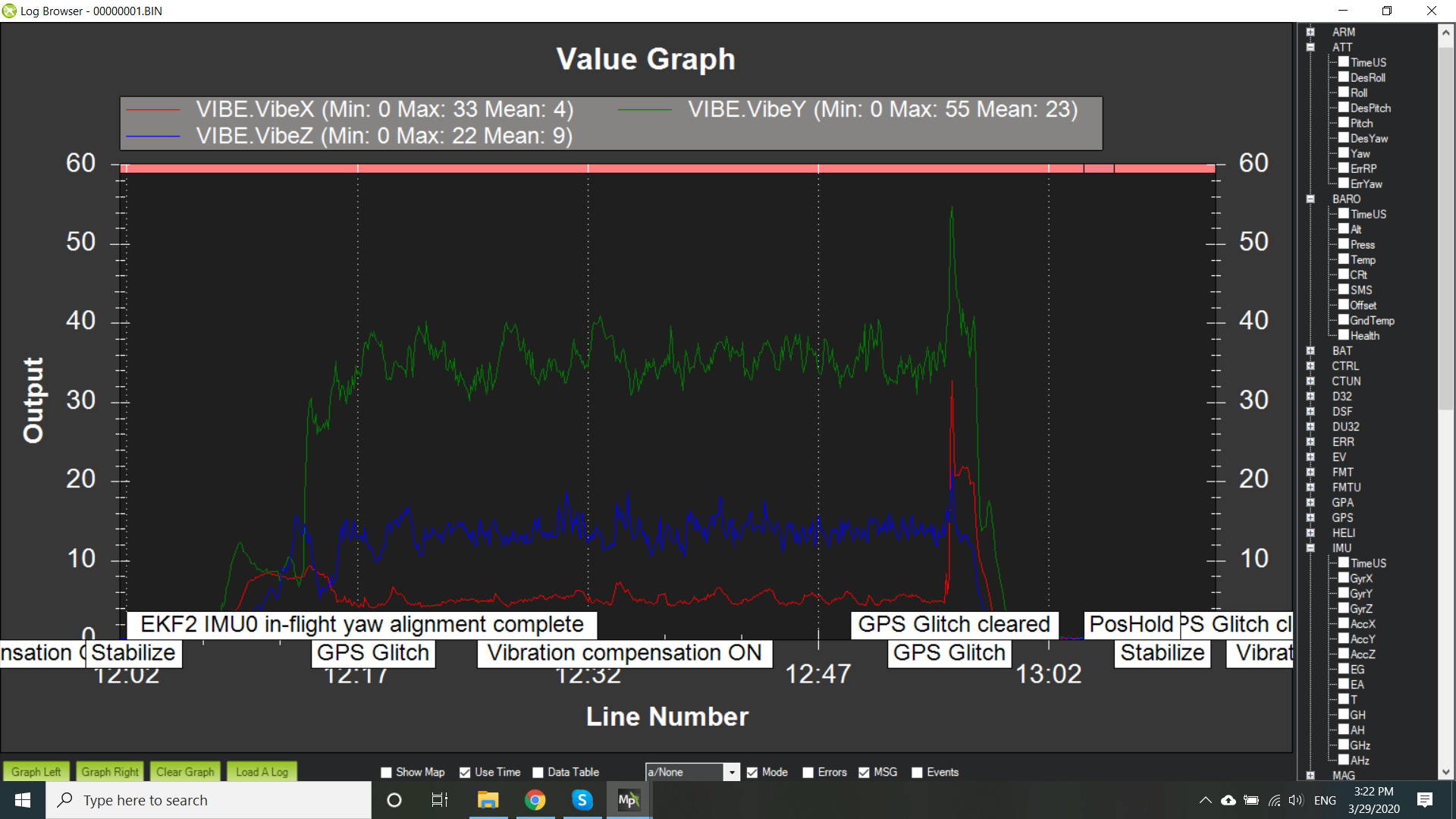
In looking at your log, you have quite a bit of vibration in the lateral axis. My initial impression is that the excessive vibration affected the attitude solution. If you look at this plot from your second flight, notice the roll attitudes. Was your aircraft really oscillating between 10 and 30 deg?
Did you look at the traditional helicopter tuning guide. It appears that you didn’t have your PID gains set for initial tuning? I’m really sorry about you crash. we could have prevented it. It is very important, especially with helicopters, to do your initial flight and then review the data to ensure that you don’t have bad vibrations. The VIBE parameters are the best look at how good/bad your vibrations are.
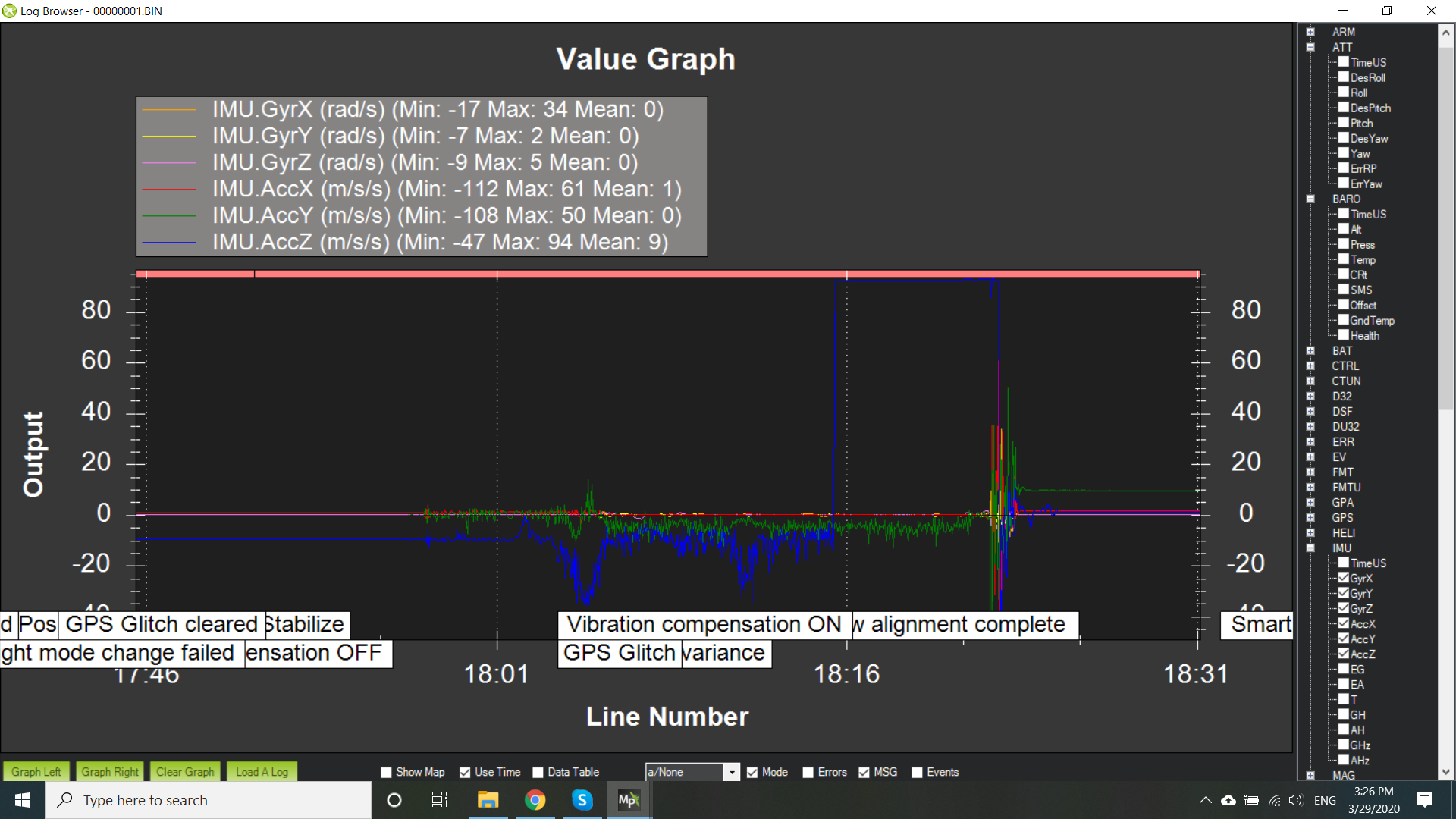
So i think I found the issue. I don’t think it was the high vibrations. Note in this plot that your z axis acceleration goes off to a really high value. This is what caused the bad attitude solution and what I think ultimately caused the crash. I am not sure whether this is a sensor failure or something else. So I would say you wan to bench test the flight controller and see if the IMU is giving off good information. If the z axis is still showing some nonsense value then the sensor failed in flight.
Thanks Bill and Tridge for taking time to look at my log.Now i am relieved to find the root cause of the crash as i was confused to see my helicopter behaving weirdly without any control input.The reason for me to use the latest firmware was F-Port as it was just added to the latest firmware.Otherwise i always use stable.
The crash wasn’t that bad as it crashed on a grass.Main gear,one rotor blade holder,flybar holder are damaged.Main shaft looks okay.
But lessons learnt.
First lesson is to setup 2 easy accessible switches.One for acro mode and second for motor interlock.Do you think that crash could have avoided if i had switched to Acro mode?
Second lesson is to check a log after the maiden flight.
My FC board was mounted solid without any dampening.I think i should mount it on a rubber suspension.Main rotor blades were perfectly balanced using Koll rotor blade balancer and main shaft was new and i spent extra time to fine tune blade tracking.Yes it hurts but i guess it the part of our hobby.
Regarding the failure of the MPU6000 gyro,i think it must be some manufacturing defect of the invensense chip as i think its not possible to make duplicate MPU6000 chip.
Now time to get the replacement parts and rebuild it again:)
I just plugged my heli to mission planner and Z axis readings and attitude on the HUD display looks good.May be its failing intermittently.I won’t take a chance and will replace the board.
In my experience with the new virtual bar acro it can handle a bad attitude solution if you can handle the helicopter. It will tend to drift a bit but you don’t really notice it as it’s like correcting for wind or something.
Any self-leveling mode will be really hard handle with a bad attitude solution. Not impossible, but it requires very weird control inputs with a self-leveling mode turned on.
I think helicopter is the largest user of acro in Copter, and since we fixed the acro mode so it works decent, it was one of the most significant improvements for helicopters in recovering from a bad situation since the beginning of ArduPilot. Downstream FBL units not required anymore because the vbar acro outperforms a FBL unit, hands down.
Can the new vbar acro mode be used on flybar helis?
Also regarding my crash, i left my FC board plugged in and IMU is showing correct HUD display on a mission Planner.I have no idea how these normally fail?Do these chips fail under vibrations like mine did?
I am sure going to replace the flight controller board.Is it necessary on the helicopters to have damped mounting of the FC?Thanks.
If the helicopter has a flybar, that’s even better. Because acro with flybar is straight-thru control, just like flying it without any sort of gyro’s on it. The electronic “virtual” flybar we made in heli_acro is about like it, except if the attitude solution goes bad it will tend to drift in roll or pitch. But you can control it because we made it so it bleeds the attitude solution off to whatever is current attitude. And if it “thinks” that is 30 degrees of roll, big deal. It doesn’t actually depend on know up from down.
I have no clue how those chips fail. With controls with internal IMU damping I mount them solid. You will need some sort of mount that damps vibe if you don’t have one of those.
We’re only currently flying the CUAV V3x and Drotek Pixhawk 3 Pro in our heli’s. Both of those have internal damped IMU’s. The V3x has dual heated IMU’s (out of three), the Pixhawk 3 Pro only has one heated IMU (out of two). Those IMU’s can drift too - our preflight involves warming up the unit prior to flight so the IMU is at at least 100F before we arm the system and start the engine.
That’s awesome.I will try acro mode as soon as i rebuild.
One more question.How is tail controlled in Acro mode?I mean if software will control like a normal Gyro?
With a flybar head you can’t run any rate P or D gain - those must be set to zero. It will make the helicopter shake like a leaf in the wind if you set those to any positive value. The VFF is normally around .22. You can run some I-gain in the rate controller - on flybar heads I’ll usually set it to .12 on both pitch and roll and that makes it track pretty good in auto flight mode. If it tends to porpoise when flying a straight line at high speed (> 50kts) then increase the I-gain more on pitch.
With a flybar head there is no real “tuning” you can do. If you are running the head slower than design speed for the flybar, then you’ll have to add weights to it or see above - you’ll get really bad porpoising in auto flight mode that you can’t “fix” with rate I-gain.
Ah …that’s why my helicopter was not stable in the wind.It was little windy and i was having hard time to stabilize it.Thanks for catching out these parameters.
After rebuild,i am going to follow tuning guide very precisely.Thanks Chris.
Hi all,
So i rebuild my heli and replaced the board.I flashed my omnibusF4V3Pro with latest stable adrucopter release.
I am having same issues i was having before:
GPS glitch and few seconds later GPS glitch cleared.
Vibration compensation on
ekf variance etc.
My board is hard mounted inside the frame under the main gear of my blade 4503D and GPS is mounted on the boom .I only get these errors once the rotor head starts spinning at normal speed.I checked my log and X and Z axis vibrations are under 20 and Y axis is between 20 and 40.I also checked my log for GPS errors and my hdop stayed under .8 all the time and had more than 18 sats all the time.I will post my log soon,