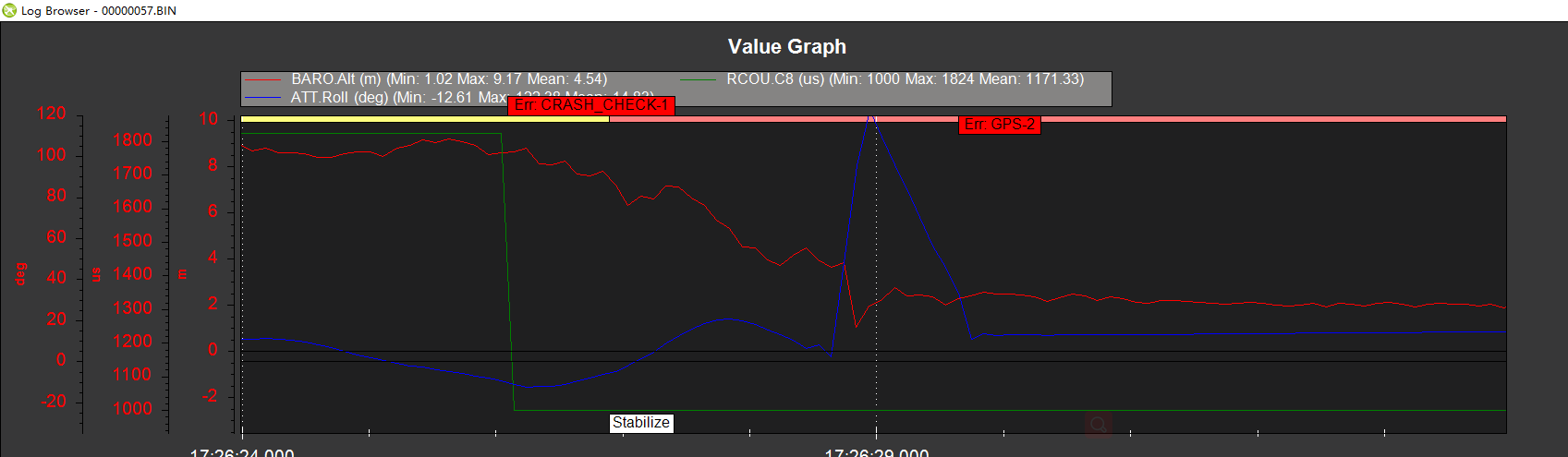
Here, we have a very strange crash log, the flight control detect crash when the helicopter still in the air, then cut off the power, and vehicle drop down immediately and crashed
Surely you can’t fly safe with the attitude controller that way off in the first place, so cutting down power is the only reasonable way to prevent bigger damage and/or injuries .
Was it flying fine before that ?
Maybe something mechanical went off in the control link chain (actuators/ pitch links)?
@jinchengde I’m sorry that you crashed. I agree with @Ferrosan. This heli was either not tuned properly or there was some sort of failure that caused it to have the desired attitudes significantly off from the actual attitudes.
@bnsgeyer@Ferrosan
yes, I agree the helicopter not tuned properly to fly, but my concern is why trigger the crash_detect when the helicopter still in the air.
the helicopter could fly in stabilize mode but have some huge vibrate in loiter, I suppose that must be some tune problem like PID, that could be solve.
but should we need to trigger the crash detect to cut off the power immediately when the helicopter still in the air even some vibrate, for prevent bigger damage and/or injuries ?
As you have shown, they use angle error to determine crash. The expectation is that you would never see that large of angle error if the aircraft is tuned properly. Not sure why they don’t include altitude. Probably because the crash could occur on terrain that has an elevation different from the launch point. You can disable it. I have disabled it for all of my heli’s. most helicopter crashes are pretty spectacular and the crash detection isn’t going to minimize damage all that much. regardless, you are going to replace most if not all the rotating components. just my 2 cents.