I use Aerospire governors too. But that doesn’t have anything to do with the rpm that you get in Mission Planner. The Aerospire has its own hall effect pickup device. You need a separate rpm pickup for ArduPilot and use pin 54. The Aerospire hall effect sensor works fine with ArduPilot’s rpm, but it doesn’t work if you try to y-cable it.
Hi Chris
I’m using y cable as you say.
The line from the tachometer goes to the one on the governor, the other to the Pixhawk aux.
I’ve been getting rpm information so far.
If you do not receive it, you can get it if you change the aux port.
But different in 3.6.0
Does not work on any aux port
It’s a feature that worked well over the y cable.
If you are not working in 3.6.0
Do I have to attach other sensors to my helicopter?
I’ve only gotten it to work with dedicated hall effect sensors. A hall effect is a transducer and it requires proper VRef and ground to work. y-cable it and you’ll get erratic governor operation, or erratic readings on the ground station.
My helicopter is an engine helicopter.
The Y cable was used in 3.5.7 firmware.
The RPM is set to 6600, but it actually moves to 6400 ~ 6800.
Can i solve the problem that you mentioned?
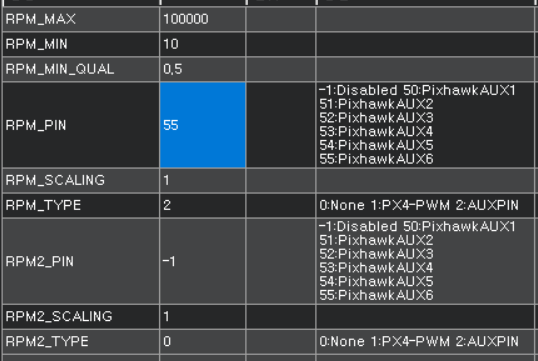 rpm1 and rpm2 have been tested several times alternating.
rpm1 and rpm2 have been tested several times alternating.