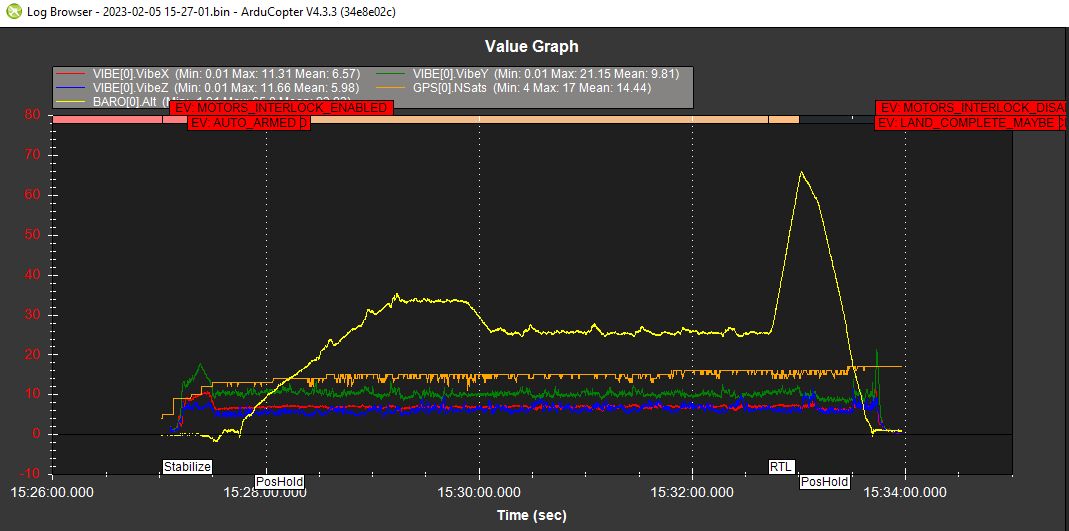
Yesterday was a good flying day and my heli appeared to be behaving well
until I selected RTL, at which point it headed towards the stars, well above its RTL_ALT level. I switched back to PosHold and landed it safely in that mode.
Any idea what might have caused this, please? Attached is the param file and a link to the log file of the flight. Note that I’ve defined a vertical fence simply to ensure that I can’t take off without a valid GPS fix, and this was the first flight after I changed it’s configuration from 1 (RTL) to 0 (Report only).
I don’t have any idea what the real answer is but your baro and gps altitudes appear to not agree with each other if I am ready that telem correctly. The baro looks like its reflecting what you describe but the GPS sorta just stayed at one alt after takeoff. I don’t really understand how they are factored in together on ardupilot though or if that could even be part of the issue or not.
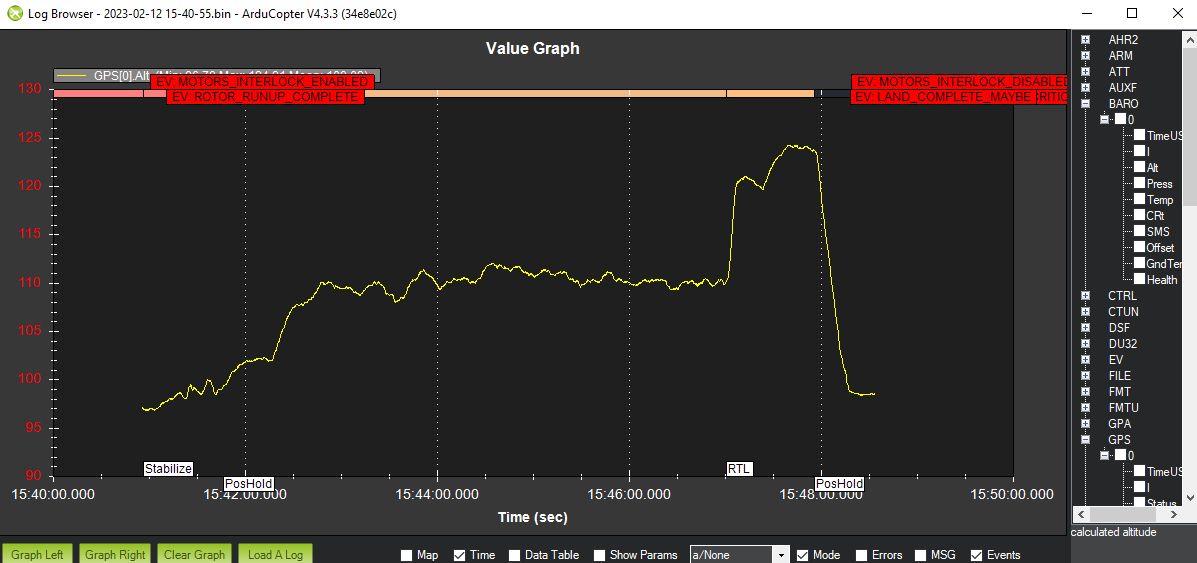
Following last week’s attempted stellar flight, this week my heli returned correctly (I think) to the launch coordinates when I activated RTL, but then didn’t commence the descent within the time frame that I would normally expect. Perhaps I should have waited a bit longer but, since my flight time was expired, I reverted to PosHold and landed manually.
The attached screenshot illustrates the issue, and a link to the log file is below. The param file is unchanged from the one in the opening post. Is there any clue there as to what caused this, or last week’s, misbehaviour?