Hi there,
I put a LW20 on the copter and got it working by serial port. I did it to get more precise height measurements. That seems to work.
But the height control loop is now prone to oszillations after ascending/decending. There aren’t too many parameters around and the only one which could did improve the situation is
RNGFND_FILT 20
I increased it from default and 20 seems to be the maximum as any higher values are reset by the autopilot. Higher filter frequencies should reduce lag…
I also tried
EK3_HGT_DELAY 60 → 250
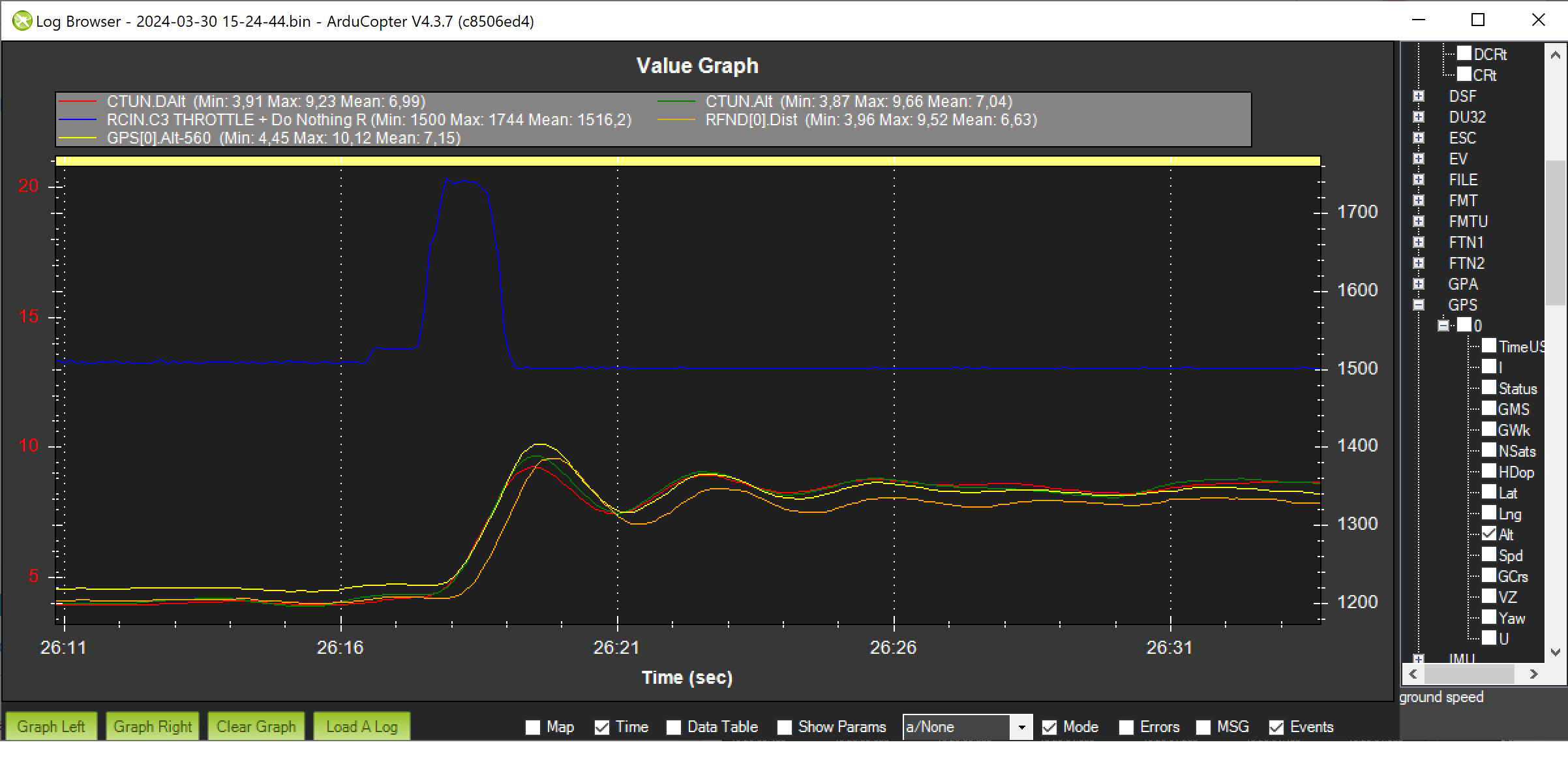
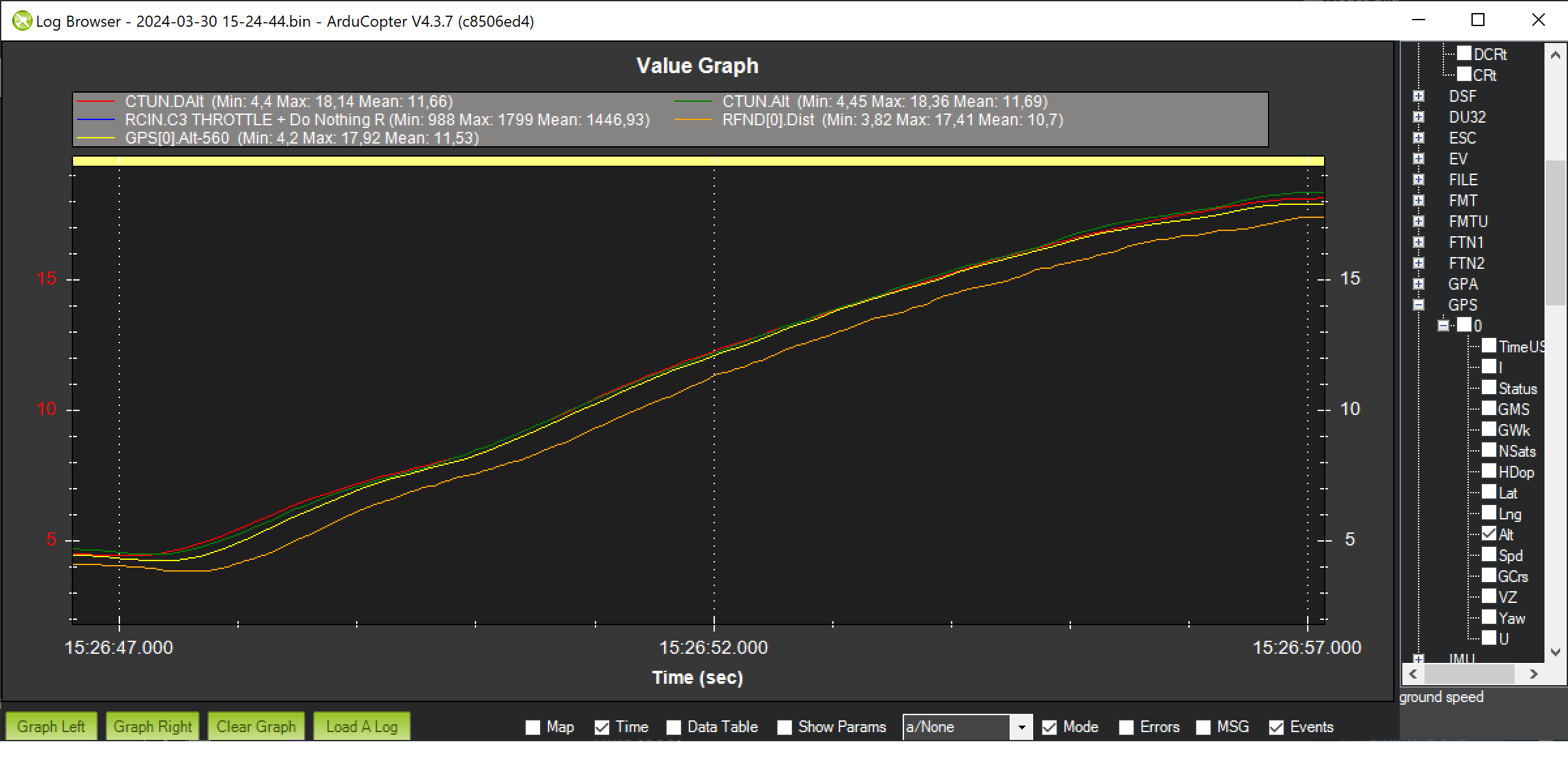
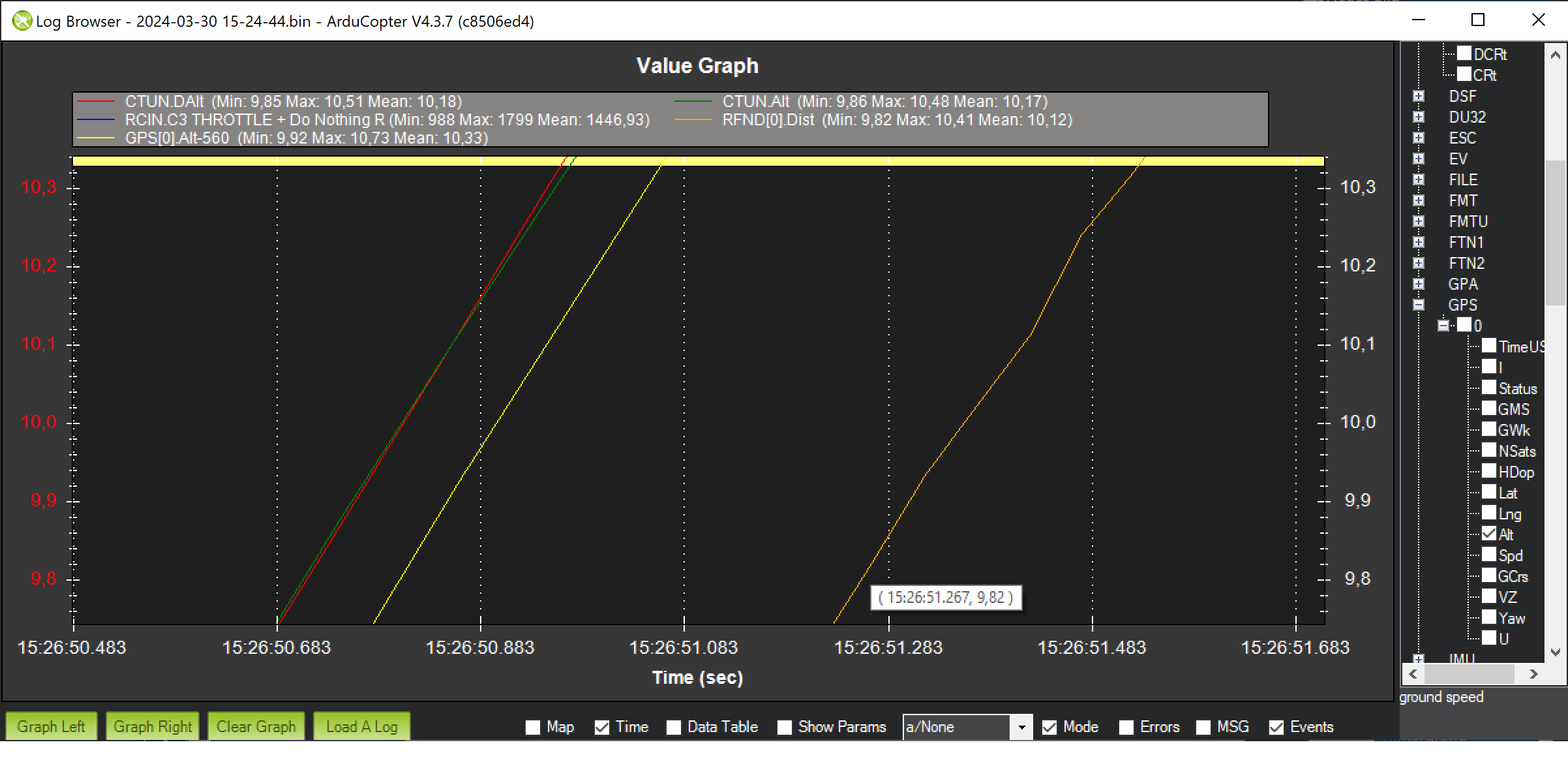
but the maximum allowed there is 250. Looking at the log and comparing RFND[0].Dist to CTUNE.Alt shows a lag around 600ms. That’s even much slower than GPS[0].Alt.
What could be done to get height control loop working properly?
Disconnecting the lidar could help, then it’s pretty decent, hardly any overschoot ![]()
To me it would be ok to connect the lidar just to get the values in the log.
Thanks Ruediger