Hee Wing’s FC board (early type), with Matek issue correctde and seemingly happily running latest Arduplane. ELRS Rx.
The Rx has been taken from a working VTOL into this “problem child” inoperative one, so TX/Rx settings, link connection and wired connection into FC all proven. Boots to linked Rx LED.
Multiple times checked parameters for ELRS inside MPlanner
FC boots on battery connect via same beeps/lights as working Ranger.
NO action at all possible. On boot one motor pod drives back, thats it. Cannot calibrate, no activity, green bars immobile, red lines for throws near together on ele and roll.
On reloading parameters (again) system warns that servo outputs are outside range. Well, yes they are, and I cannot get the Tx to alter them in calibrate.
not realy much information you send. If some other should check and help let him see your settings, describe your setup, give details of the used components and connection.
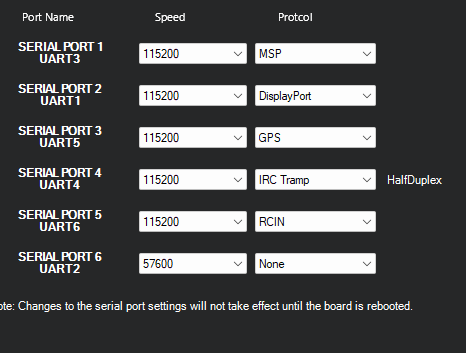
Did you follow this for RC input setup? Hee Wing’s FC board
or is your FC different?
It is a PNP Ranger VTOL supplied pre-wired and supposedly ready for a receiver and calibration as per their manual after physical assembly of wings and tail.
The parameter file is again standard Hee Wing issue, supplied pre-installed, though when it didn’t operate I did re-load it (with it being taken from Hee Wing website, stated for the VTOL), which made no difference.
The ELRS receiver, its wiring, and the as supplied parameter file with settings for ELRS (rather than SBus) work in another supposedly identical VTOL, hence I felt no point in posting. I have manually checked the settings are for ELRS. The two FC units and pre-installed wiring are as far as I can check identical.
The connection ports all tally/match the working VTOL.
There’s no actiivity when installed to this one. I reluctantly tried updating the firmware from the version of Ardupilot supplied by Hee Wing pre-installed to the latest, quite a step, and then reloading their parameter file, but no difference, no activity.
The receiver boots with all normal lights, the FC boots with identical lights and sounds to the working one, but after one tilt motor driving back on boot from wherever it is as it boots, there’s no further movement action and no activity in Mission Planner to enable calibration.
Sorry, I don’t understand your attitude. You are the one looking for help. Then you must also support potential helpers and answer the questions that arise. You have now just repeated in many words the same thing as before, with the conclusion that neither you made a mistake nor is there anything different between the drones. If that is true, there are no problems. If that is not the case, something is broken, wrongly connected or wrongly configured. This can only be checked remotely with your precise information on the HW, SW, SW parameters and logs.
Old Man disease! I had forgotten to reboot hence (I think) not matched.
I have made some progress overnight (apart from regaining a single brain cell, doubling my capacity!)
Yes, ports 5 and 6 were reversed. Have now ensured that the non-working model now matches the working one for all ports.
This has enabled TX action into MP Radio Calibration, and after that, ranges are now showing red lines at OK levels and green bars move OK from Tx.
No arming though, and on boot from battery, with no USB connected, the ESCs sound like a good power up boot, ending rising two beeps, but the left tilt drives back to limit and nothing can be controlled, nothing moves to sticks, and no arm.
Had to move on but will upload latest state when able.