We have made this 21KG hexacopter, to carry on a 6kg sensor, for a total of weight of 27KG
it has:
6 x T-Motor P80III 120KV, Aplha ESC integrated (12S)
6 x MF 3016 Props
4 x 6S 30000mah LiIon batteries
Orange Cube Plus
FW 4.4.1
Here 3
Mauch Electronics Power System
Drone weight: 11Kg
Drone with 2 batteries (12S 30000mah): 16.2KG
Drone with 4 batteries (12S 60000mah): 21.5KG
Drone with max payload: 28Kg.
I have made autotuning several times, the results are very similar, but the drone keep having a no reliable behavior in Loiter, If i do a hard roll or pitch braking, start o oscillate very hard, almost went down several times, the only way to recover is to go to Alt-Hold
Here are 2 videos, the second one was almost a crash, recovered with Alt-Hold, but you can see with a gentle pitch moving and release, the oscillations went crazy
Here is the log from today
of the last flight and the log., if anyone can give me a hand to understand what its going on will be great. In this log I was trying to go up and down the P and D from roll and pitch looking for a good result.
Probably your expo value is incorrect for those ESCs. No mater how much you tune, if that value is not correct it will always tends to be unstable at an operation point.
And do not post in the ArduCopter 4.0 section.
You are most probably not using that outdated version
Yes, sometimes it looks like it makes no difference because the PIDs can compensate the wrong values if you move slowly enough.
But if you test it with increasingly aggressive manoeuvres, you will notice that some expo values are wrong and lead to instability. Either unstable at low throttle values (very dangerous because you always need low throttle values) or unstable at High throttle values (not so dangerous because you can simply reduce throttle in most situations and regain control)
Today I did the test with the old setup, and the result was the same. BUT! As I have read a lot of forums, someone say the drone is too light for that motors. So I have installed the 6.6KG payload (28 kg total drone), and now the drone is working better. I did the autotune with the payload, now work much better, but with hard roll or pitch, the oscillations start again.
This is the last flight, some minutes ago. Im trying to accomplish a flight plan, and it is impossible, the drones star oscillate very hard in the second waypoint, i have to change to alt hold to recover. AltHold works great by the way.
In my opinion, the drone has too high a thrust-to-weight ratio and the motors run at minimal speed. Therefore, it is crucial to set the parameters described in the manual: https://ardupilot.org/copter/docs/set-motor-range.html
You can also try to reduce prop size or add more weight to achieve a hover of approximately 40-50% thrust.
When it comes to ESC calibration, the following are suitable for Tmotor Alpha seriess, maybe you can try this:
MOT_THST_EXPO=0.4
MOT_PWM_MIN=1100
MOT_PWM_MAX=1940
Thank you, I have done all what do you have written. I cant change the porpo size.
Batteries are Ares T-Motor, 6S 30000 2.6kg 5C each (2 in serial, then 2 package in parallel to get 6S 60000 mah) , with a total of 10.2 KG in batteries.
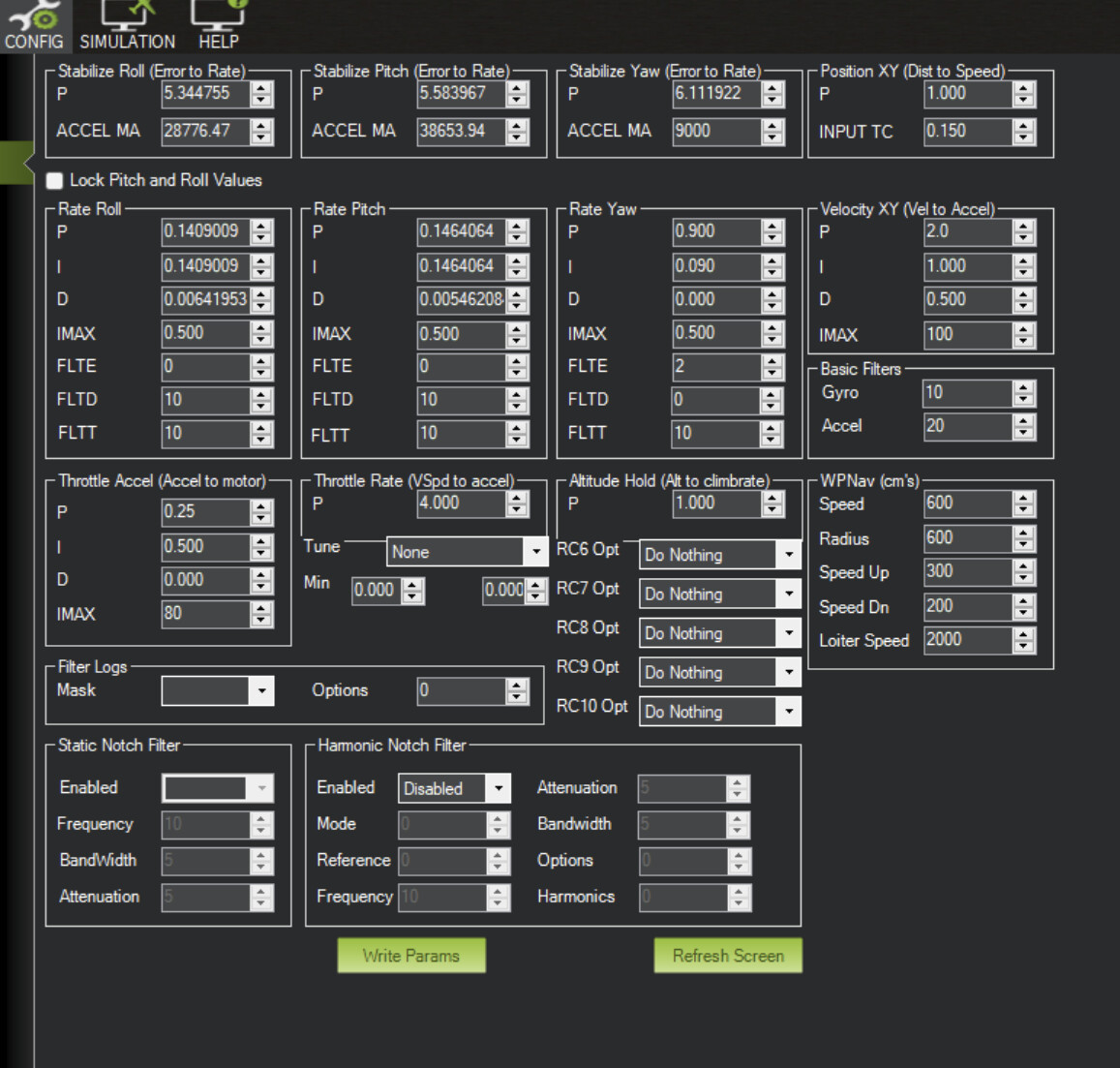
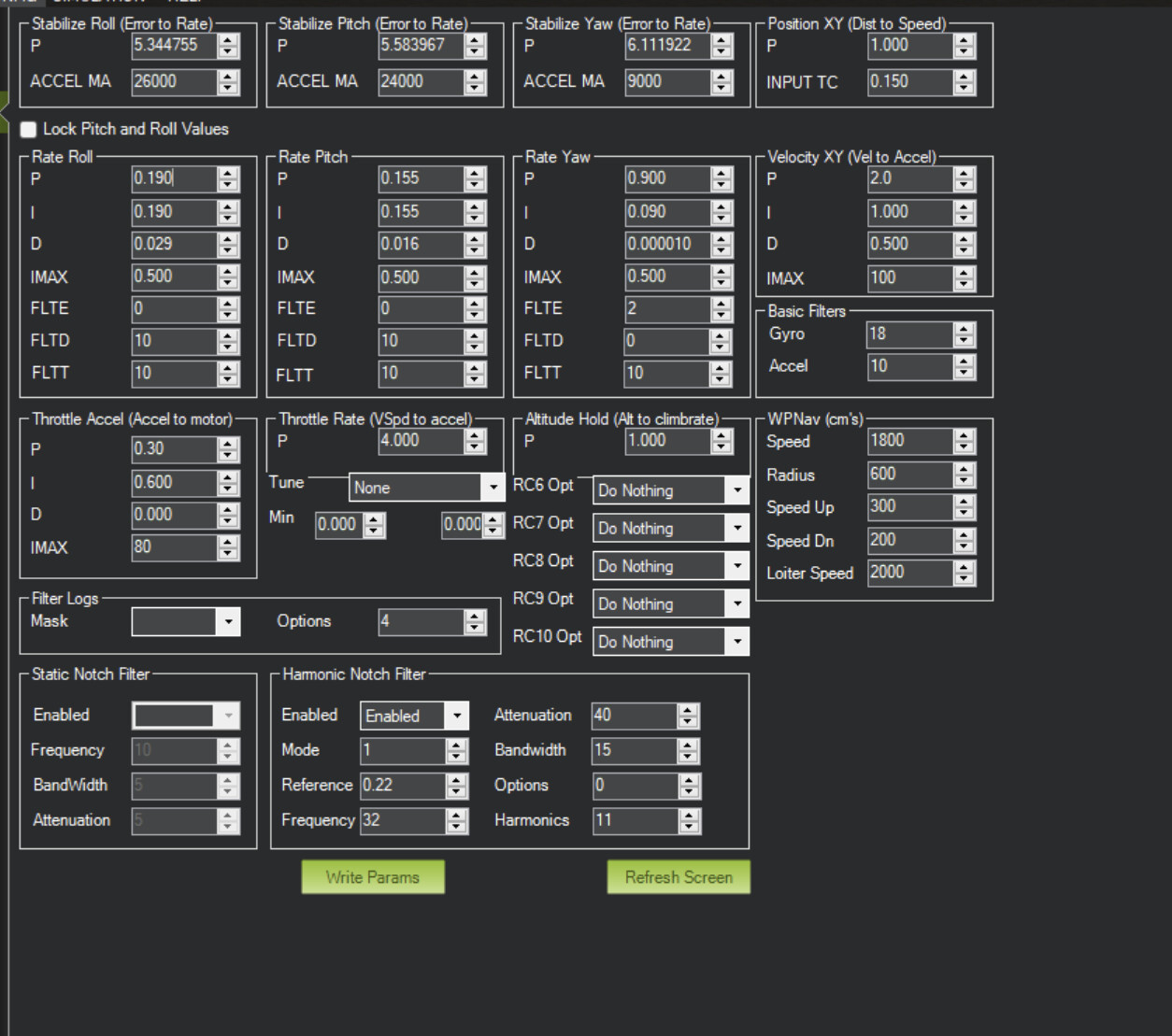
BUT, yesterday, i have done some manual PID, and this is what I´ve got.
I think your hexacopter is definitely underloaded. According to the T-motor tables, with 30" propellers (MF3016), one motor generates (50% of the thrust) 6395g x 6 = 38,370g!
I’ve sometimes gotten better PID values using autotube in Loiter mode, so you can try that too.
… and the drone has to fly over 3000 meters over sea level (is going to take off at that altitude), so I need a lot of power to compensate the lack of air