I have rebuilt my Bell 230 scale heli. It is 800 size and weighs 8.5 kg. The FC is a Pixhawk mini 4 with the latest ardupilot version.
I have already successfully set up and tuned several helicopters with Ardupilot. I tuned the last helis with Autotune.
Yesterday I had the opportunity to make the first test flight with the Bell 230.
The noise filter, Hovr2Yaw and YawAllignement have not yet been set correctly. I will do this in the future after study of the log and it is not my problem at the moment.
However, I have the following problem:
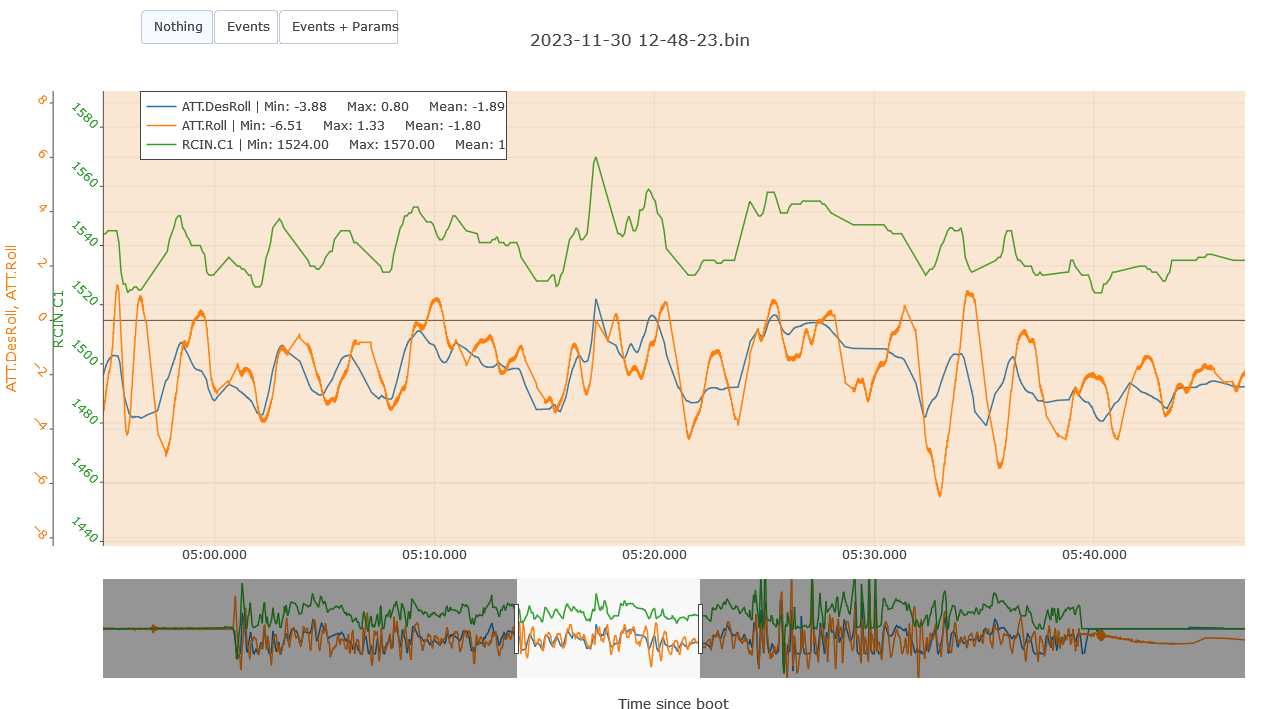
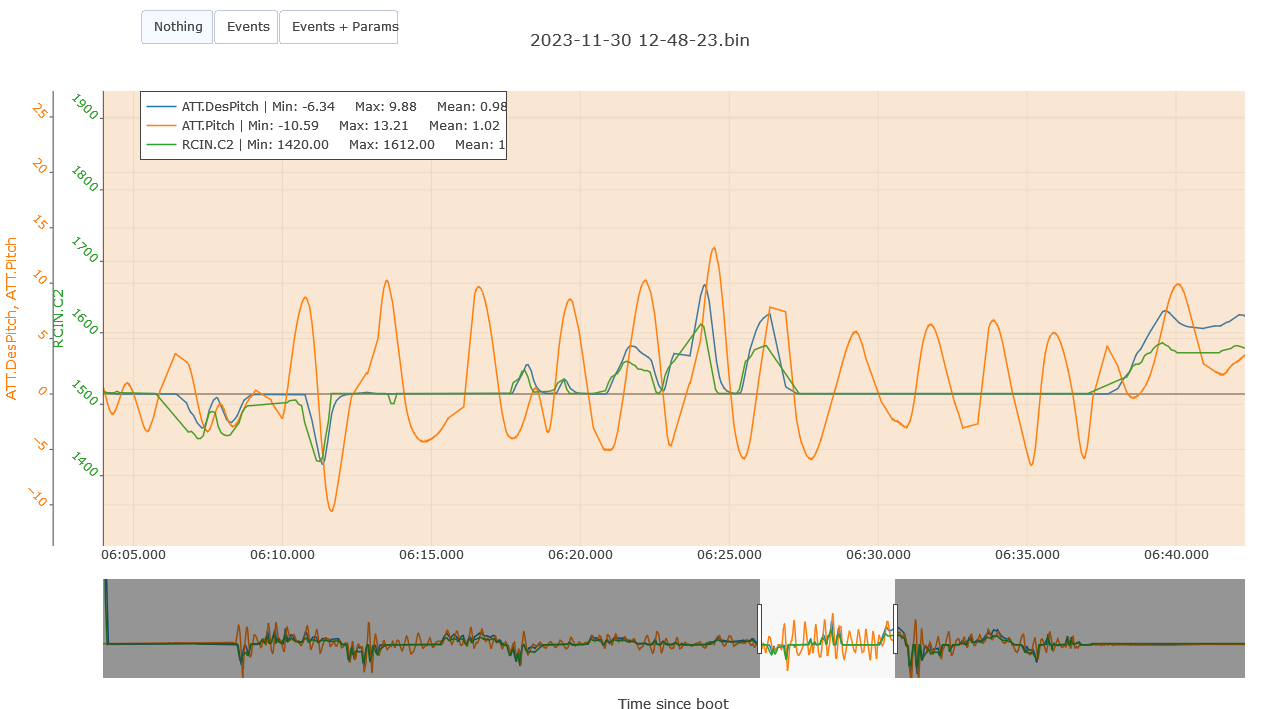
After take-off, the helicopter oscillated on the pitch level, even with the smallest control input. Sometimes even without control input. The oscillation was not fast and stopped after one or three deflections. This effect was far less pronounced on the roll level.
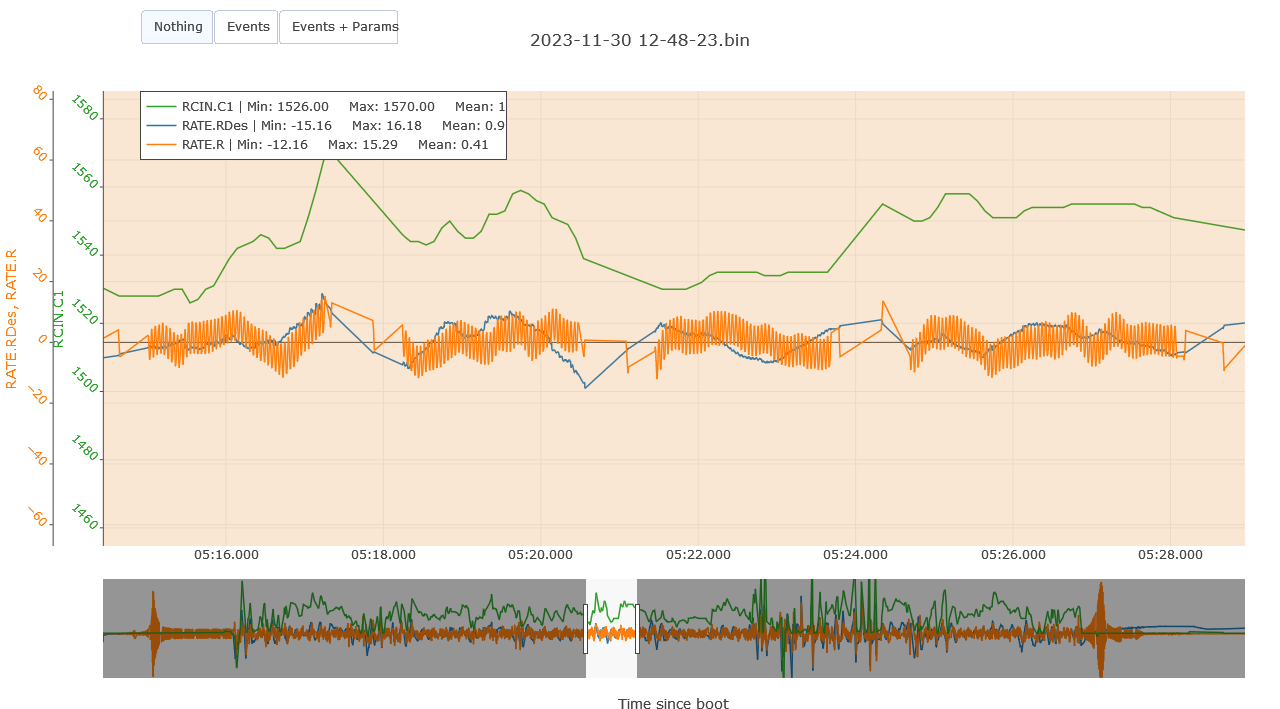
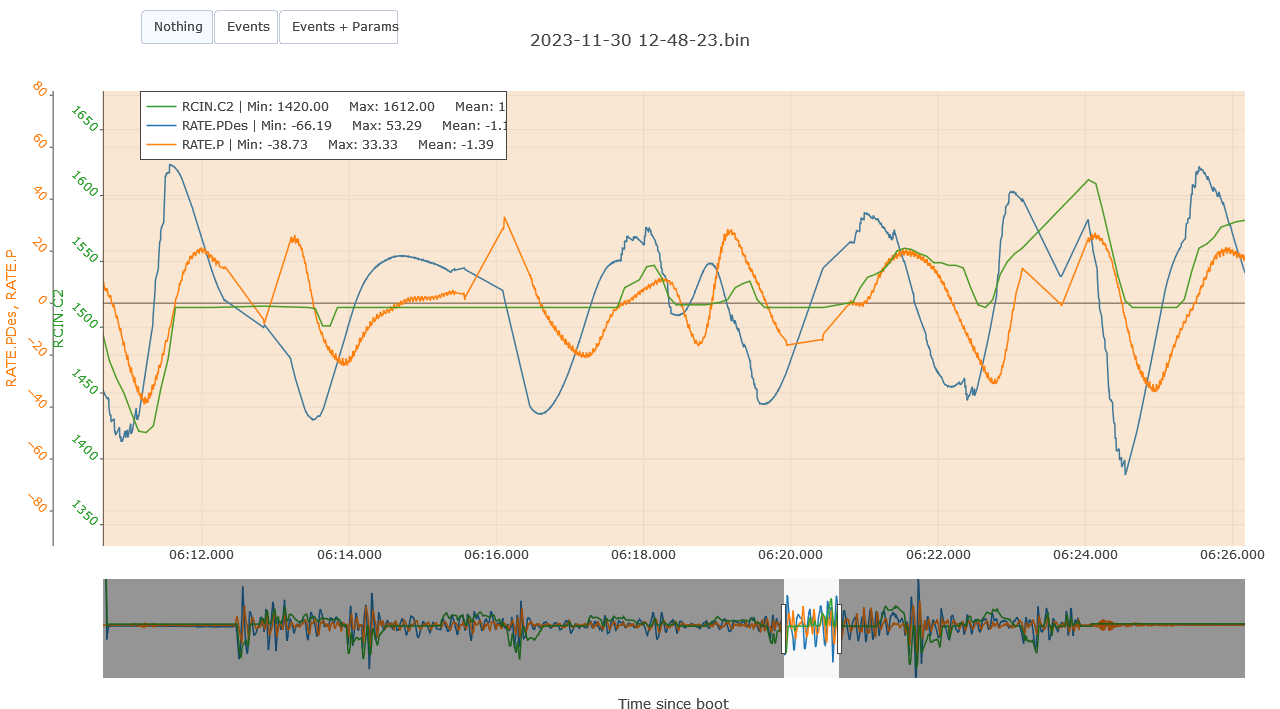
When I looked at RATE.Des Pitch / RATE. Pitch and RATE.Des Roll / RATE.Roll, I would conclude that ATC_RATE_FF is too low !??
If I now increase ATC_RATE_FF, I suspect that the oscillations will increase.
Do I now have to reduce the ATC_ANG_XXX_P?
I’ve never had this case before on my first flights with my helicopters.
Of course Bill @bnsgeyer will advise me to tune with Autotune. But with these oscillations I’m afraid that this will end in a crash.
I would therefore like to tune the helicopter manually until I have a good feeling that I have found a reasonable basis for autotune.
@heri I looked at you log. My best guess as the cause of these oscillations is due to partly that the FF gain in the pitch axis is a little low and the time constant (ATC_INPUT_TC) is too short.
Looking at your plots above, you can see the RATE.P does not follow RATE.PDes very closely and the actual rate (RATE.P) does not have the same slope as the desired rate (RATE.PDes). So that make me think this is the problem. This may be more of a case with this particular heli since it is a larger heli. Typically the pitch axis is slower to respond because of the higher inertia in that axis. Plus there may not be much natural damping in that axis so it becomes pretty oscillatory.
The roll axis looks much better that the actual rates follow the actual rate pretty well. It just has some rotor noise in it.
So my recommendation is to make the following settings
ATC_INPUT_TC 0.22
ATC_RAT_PIT_FF 0.18
i will say that the logging is not that great. You can see the straight lines and discontinuities which indicates lost data. I looked at the load on the processor and long loops and that all looks good. So it may be the quality of the SD card.
Lastly I see that you are using the alternate I term management feature, H_OPTIONS=0 (ie not using the leaky integrator). I would recommend that if you are using this feature, then set your ATC_RAT_XXX_IMAX no higher than 0.2. It will keep the controller from being able to roll the aircraft on the ground. You may want to use the H_OPTIONS =1 until you get more confidence that the landing detector is working well since the H_OPTIONS=0 feature relies heavily on this.
I will implement your suggested changes for ATC_INPUT_TC and ATC_RATE_PIT_FF and try them out. And will report back to you on the next test flight. It may take a while until then, as we are currently experiencing a cold winter in Germany.
The higher vibrations in the roll axis may be due to the orientation of the FC. This is aligned with its long side lengthways to the direction of flight. It can therefore vibrate “more easily” on roll. In addition, the tailplane of the Bell is not so rigid that it does not vibrate. Both factors probably lead to the slightly higher vibration on the roll axis. However, I think this is still within the healthy range? Or what is your opinion on this, Bill?
I will improve the interference from the rotor with the notch filter.
I will also check the swashplate again for correct leveling. I have also seen the time offset of the reactions in P and PDes. Perhaps I can improve this a little.
I will replace the SD card. I bought the MINI4 (with the SD Card) second-hand because the market in Germany was empty for a new Mini4 and the Mini6 was not yet available. Now I could also buy a Mini6.
Thanks for pointing out the log writing failures. I hadn’t realized that. Also thanks for looking at the CPU load.
The fact that the H_Options is still at 0 is a stupid copying error. Thanks for the hint! I copied the parameters from my 800size Agusta109 (same weight) as a template and adapted them to the Bell. I had equipped the Agusta with an FC when the H_OPTION was not yet available. I will check all my helicopters with FC and change the H_OPTION.
The rotor head (from VARIO Helicopters) of the Bell was originally designed as a “flybar” rotor head. I have converted this to “No Flybar”. However, I retained the damping rubbers in the blade bearing shaft.
I also kept the rotor blades. I am not sure whether they are already made of carbon or fiberglass.
So far I thought that the rotor head was configured very softly.
However, if I have understood you correctly, you think that the system is not very damped?
I believe it is more rotor noise. It comes through more easily on the roll axis because the body inertia is lower.
I don’t believe the time offset is due to the swashplate leveling. Pour swashplate leveling will show up as a non zero I term in a hover with calm winds. Yours is slightly offset but not bad.
This could or could not be a function of the rotor head. I was just commenting that the aircraft as a whole is lighy damped in the pitch axis which is indicated by the oscillatory response.
We will see what happens with the suggested changes.
Unfortunately I made a logic error and corrected the hover-roll trim from the first test flight to the second test flight in the wrong direction. I have to correct that again.
I have changed ACT_RAT_PIT_FF and ATC_INPUT_TC according to your suggestion. I put INPUT_TC on a tuning channel to be able to adjust it in flight.
From a purely visual observation of the test flight, I would say that the flight behavior in pitch has improved massively. The oscillation on pitch is much less. From a purely visual impression, it seems to me that the helicopter only oscillates once or twice over pitch when the stick is returned to neutral.
When I look at the log file, it seems to me that RATE.Pdes to RATE.P is too high. I would therefore reduce ATC_RAT_PIT_FF? What is your opinion?
The NOTCH filter works well. I hardly see any noise in the RATE loggings.
Or do you?
Thanks for your further help.
BR
Heri
PS: I still have to replace the SD card. I don’t have a new one yet.
Heri,
The Pitch axis does look a little better but I think you’ll see a bigger improvement once you tune the rate P and Rate D gains. The Pitch oscillations may be due to the Angle P being too high with even the default gain but when you tune the rate P and rate D, that should help a lot.
Thank you very much for taking the time to analyze my log file despite the pre-Christmas stress.
I have also come to the conclusion that the oscillation improves when the RAT_P and RAT_D values are correctly determined by autotune. It is good that you have confirmed my analysis.
I will reduce the Angl P value for Pitch a little and start autotuning with this setting.
Can I start immediately with autotune for RAT_P and RAT_D or should I first determine the _FF value via autotune? What is your opinion?
I would like to take this opportunity to thank you and all the helpers in the forum for your help this year. And I wish everyone a Merry Christmas and a Happy New Year with good health.
@bnsgeyer
Hi Bill,
One more question about h_options. If I have flown with h_options = 0 and ATC_RAT_XXX_IMAX = 0.2 and I have successfully seen that the flags for take-off and landing have been set, can I then set the value for ATC_RAT_XX_IMAX back to a value > 2?
Does the IMAX value also influence the autotune? If so, then I must carry out and complete the procedure described above before the autotune. Is that the case?