I am working on a quadcopter which uses Pixhawk flight controller. I receive heartbeat packet from pixhawk through telemetry radio and parsed it. values are following>>
heartbeat packet received: msgid 0 sysid 1 compid 1 custom mode 65536 type 2 autopilot 12 base mode 81 system status 3 mavlink version 3
Qground control shows the same values for heartbeat packet.
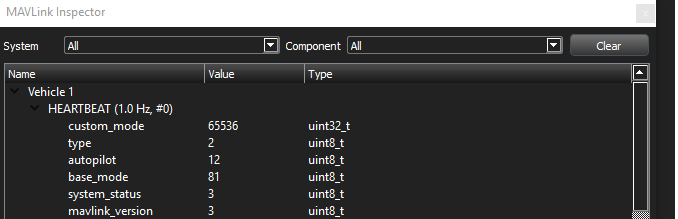
here sysid =1, type = 2(MAV_TYPE_QUADROTOR) , autopilot =12(MAV_AUTOPILOT_PX4), system status = 3 (MAV_STATE_STANDBY) these parameters have correct values.
are values of compid, custom mode and base mode are correct  , because enum MAV_MODE doesn’t have 81 as valid value for base mode. I am using mavlink library.
, because enum MAV_MODE doesn’t have 81 as valid value for base mode. I am using mavlink library.