We flied a hexa copter today and found a really wierd behavior during the flight.
It steered to the left and began to fly sideways.
Its nose was heading toward 90 degree to the left during almost whole flight.
In the Hud, flight seemed quite stable but yaw was continuously shaking a bit.
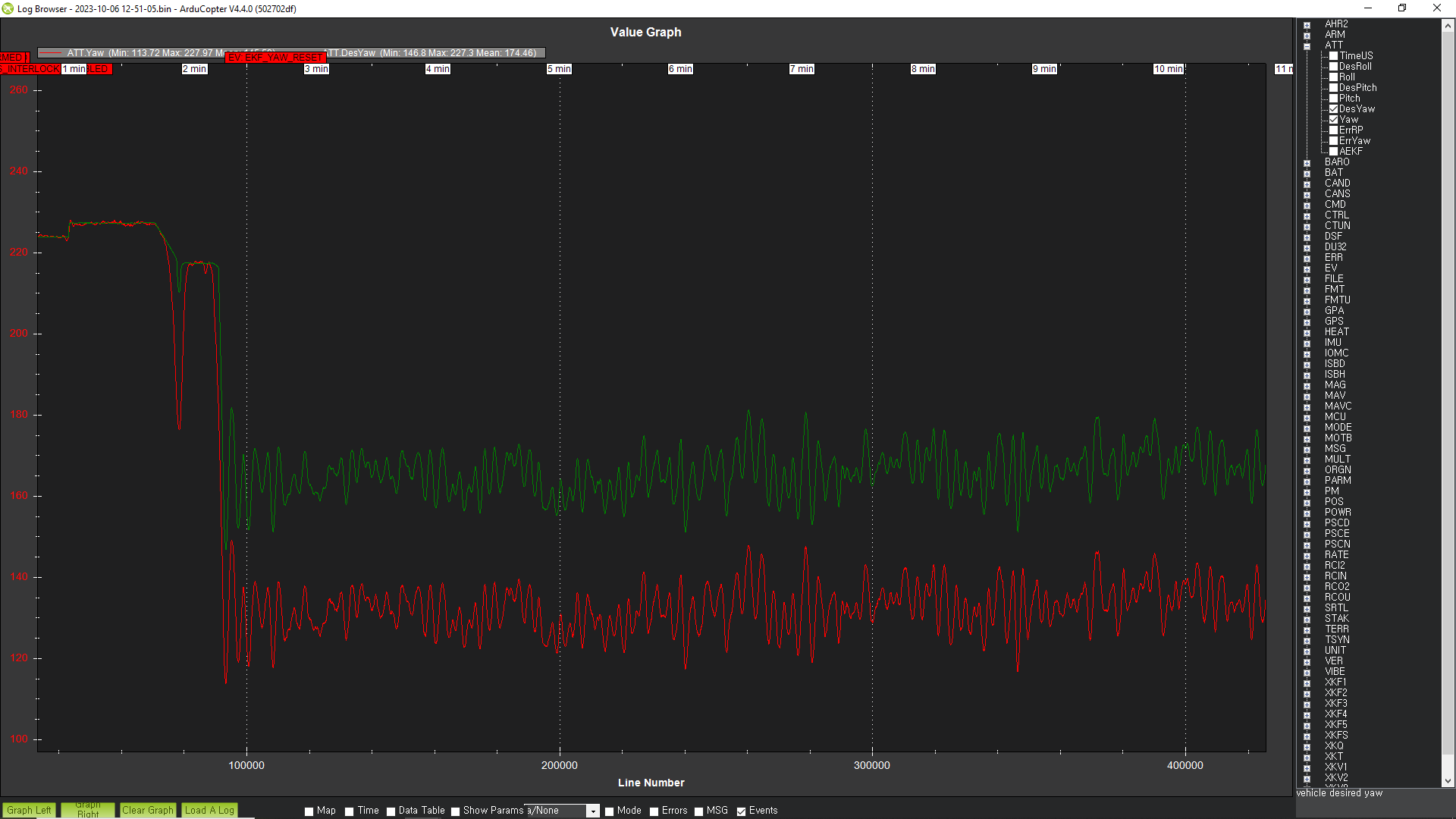
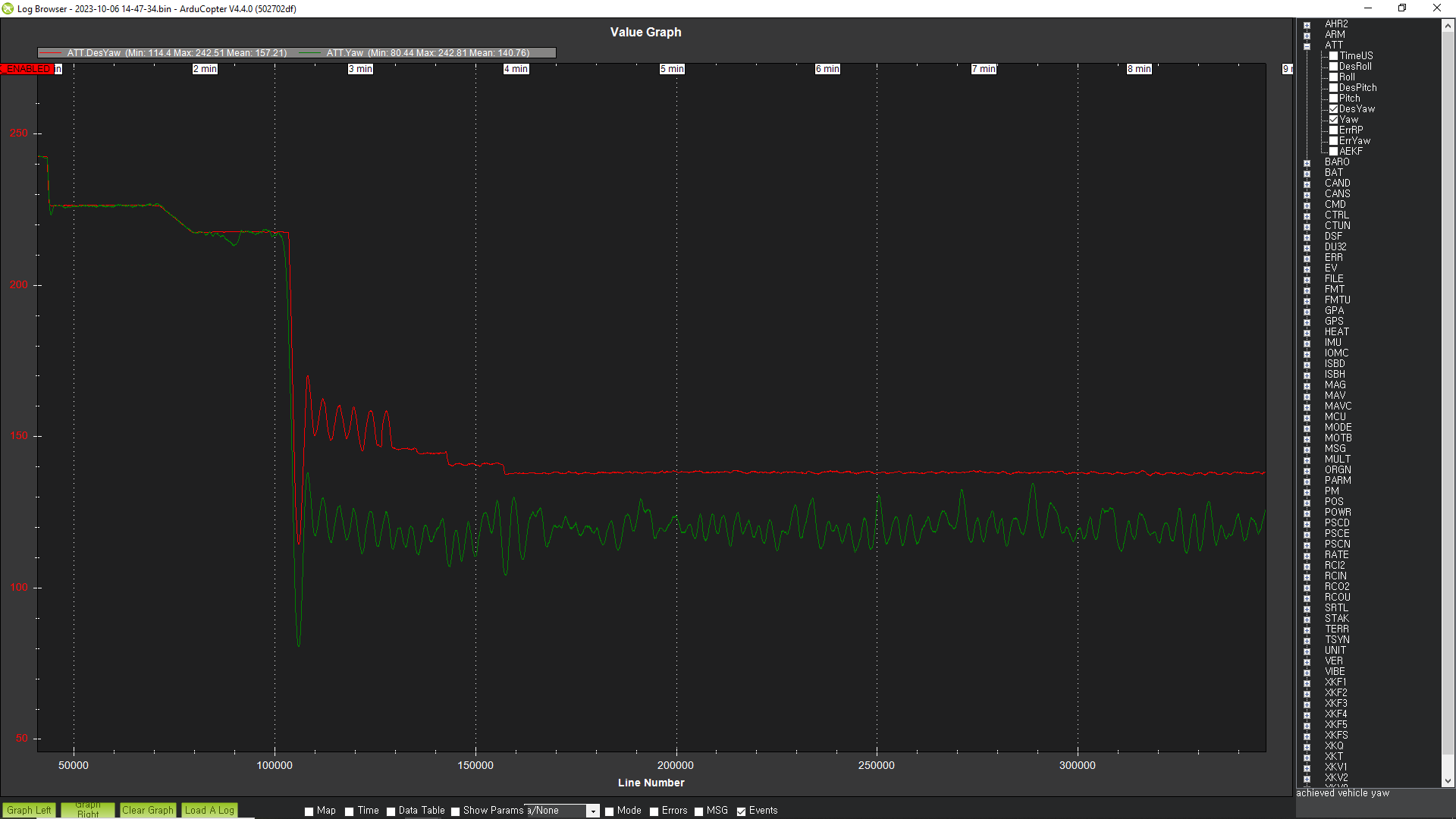
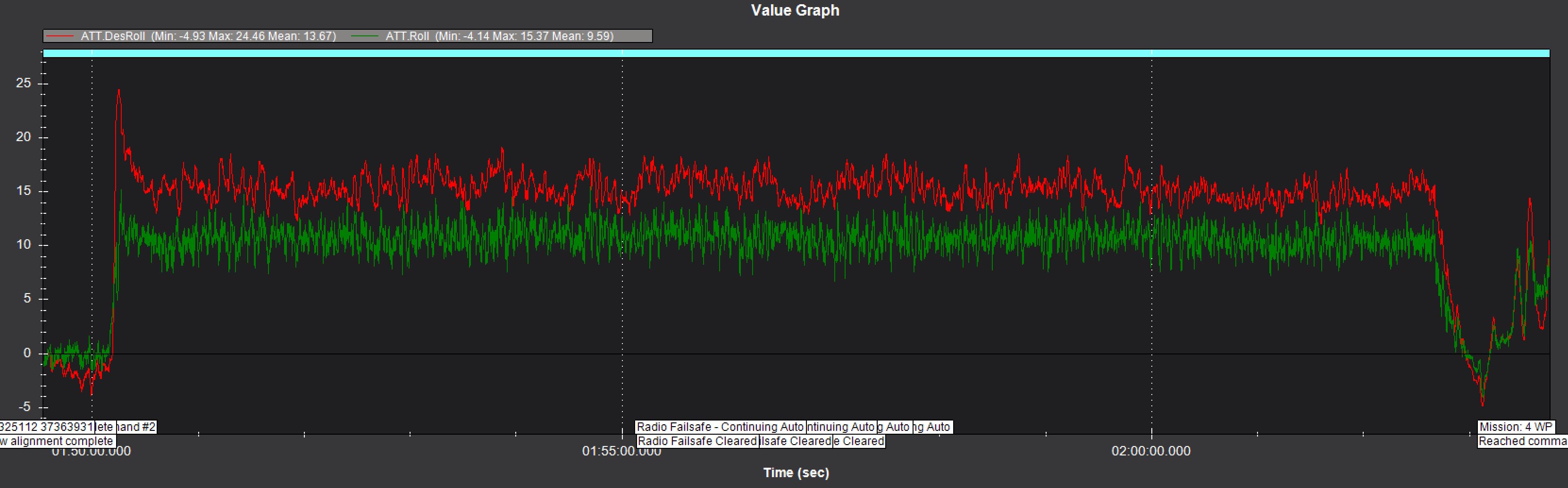
When we looked into flight logs, there was certain difference between desired yaw and actual yaw. Also, yaw graph showed us nose was keep shaking as well.
When its speed was low, drone seemed to settle and drone tilted into foward. Still, when we controlled in loiter mode to land her, heading kept changing by itself without any yaw command.
After two flights, we did yaw axle autotune but symptom was still there after tuning.
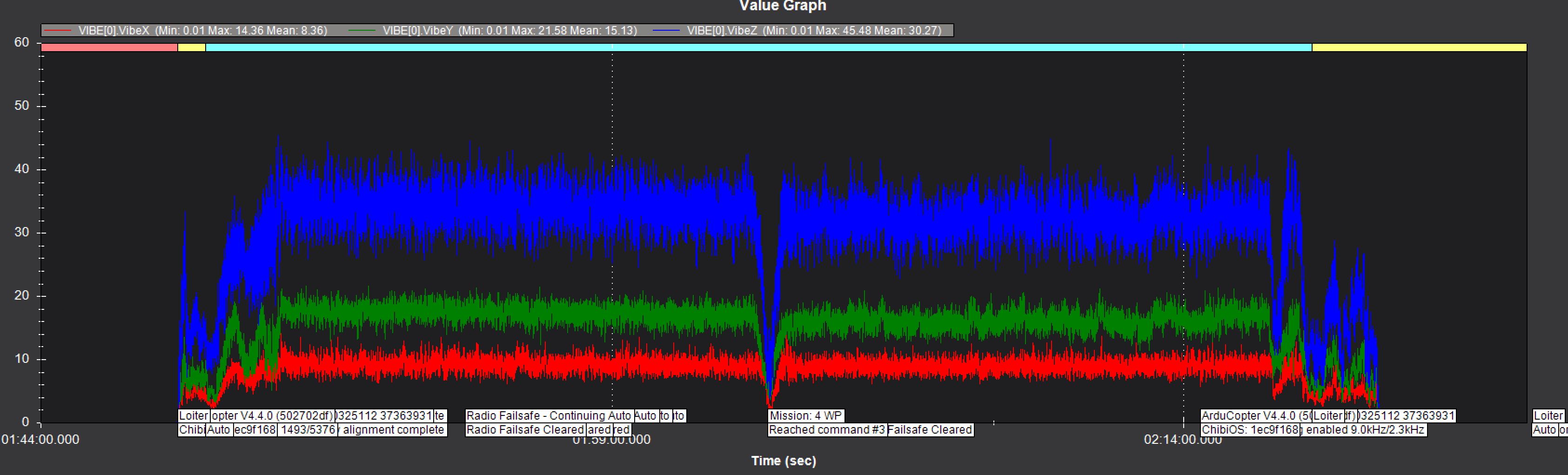
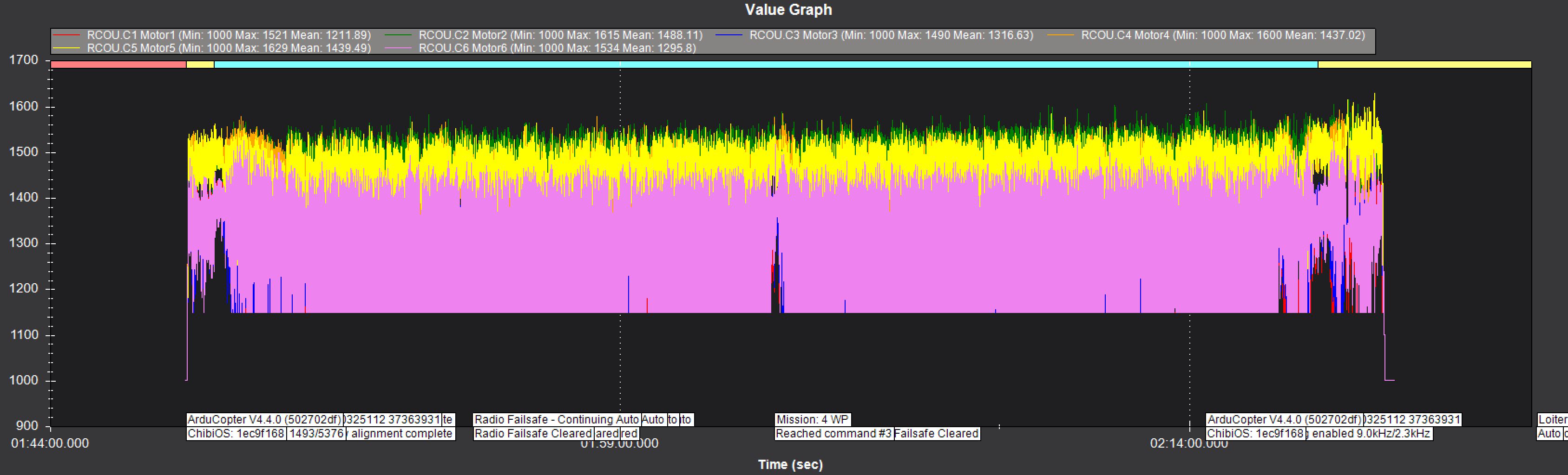
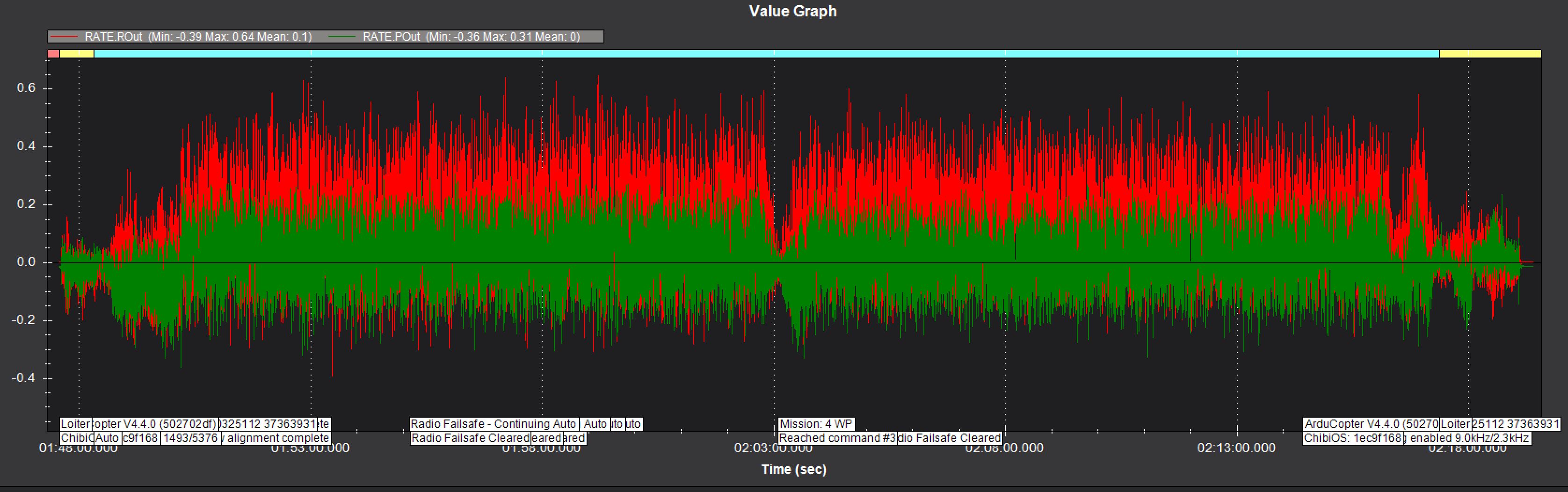
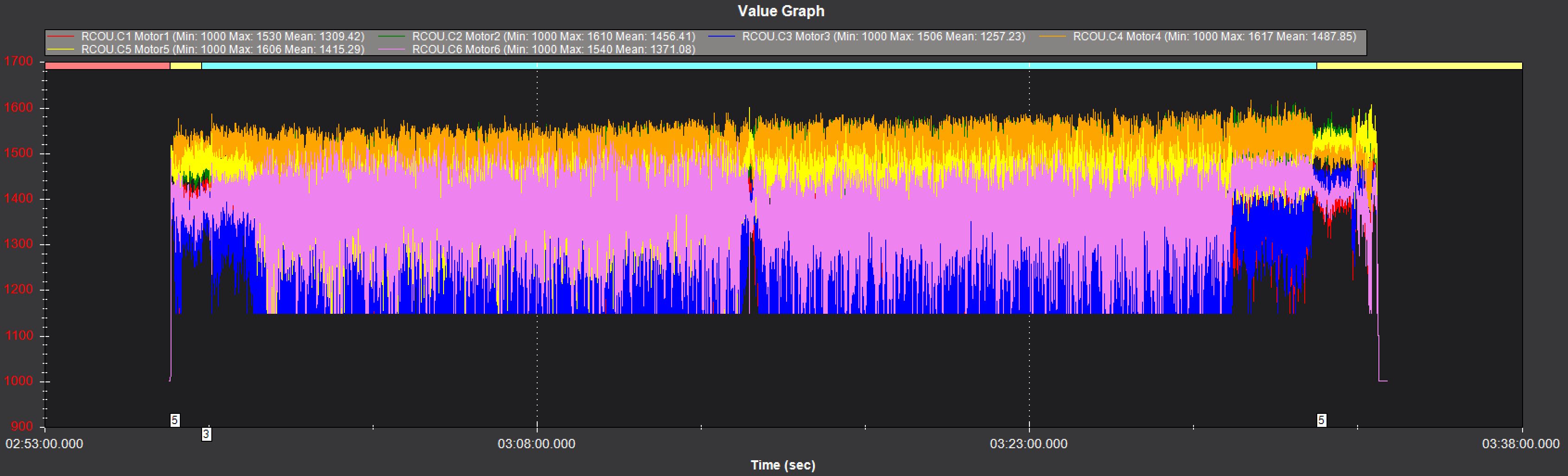
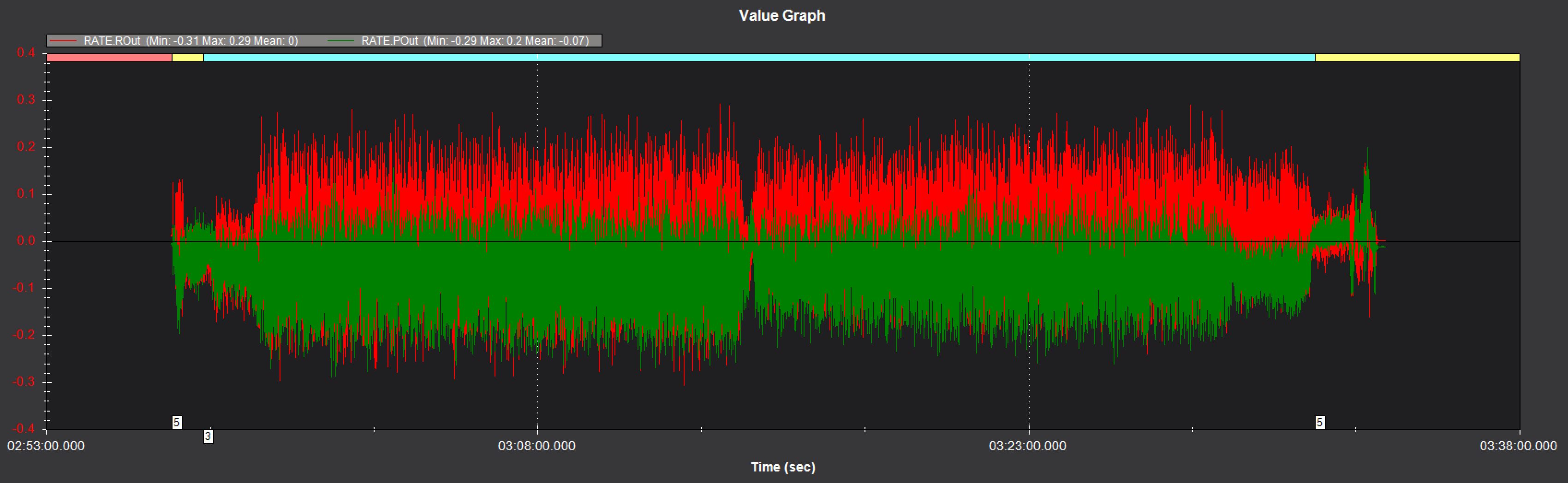
There is nothing right with this craft. The vibration levels are very high, the outputs are oscillating wildly, the tune is terrible partly because your Rate PID values don’t make sense. It looks like some manual tuning was attempted but it’s way off base.
Here are some log graphs you can reproduce as you advance tuning this craft. You should not be doing anything but a Hover at this stage:
Nothing is tuned up and the vibe levels are too high. This must be addressed 1st. What’s the prop size?
You should probably reset to default and start over after reducing the vibration levels.
OK, so 30" props on 12S, the Initial Tune Parameters are not right.
Yes but there are several steps between those procedures that require log review to look for high levels of vibration, outputs oscillation and Rate noise. At each step action must be taken before advancing to the next. And do not run an Auto Mission until tuning is complete. That’s a recipe for disaster.
Only the vibration problem has been addressed, it’s a bit better. All else is the same (bad). I would suggest you reset all to default and start over with the Initial Tuning Parameters and set these:
INS_ACCEL_FILTER,10
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
PSC_ACCZ_I,0.32
PSC_ACCZ_P,0.16
Make a short Hover flight in AltHold and post that log. It’s foolish to make Auto Mission flights before the craft is properly tuned.
At the moment, I can’t change the settings of the copter because we are in the middle of our project but I will keep the progress updated as soon as I can spare one of them for resetting. (I really want to apply notch filter to all of them instead of just using dampers)
Our team leader is happy as it is now and didn’t want to change the settings urgently. We flew 3 long distance sorties today and it was quite stable. Stabilize PID was adjusted yesterday.