Hi Guys,
I have built a boat and I need a firmware for my Pixhawk 2.4.8. Could someone tell me which one to select?
I make the turn by modifying the power of the engines. would the autopilot support that?
Thanks in advance
Hi Guys,
I have built a boat and I need a firmware for my Pixhawk 2.4.8. Could someone tell me which one to select?
I make the turn by modifying the power of the engines. would the autopilot support that?
Thanks in advance
ArduRover Pixkawk1 is the correct firmware for that board.
You have 2 motors and you are asking about differential thrust for steering?
Thanks, so much
Sorry for my, ignorance
But i can´t find these firmware here.Did you have any direcction?
Yes i have two motors and i want to turn by de difernt of speed betwen bouth, it’s posibol?
The link is here.
https://firmware.ardupilot.org/Rover/latest/Pixhawk1/
You can download the ardurover.apj file and then use Mission Planner selecting Load Custom Firmware to update. But you should simply be able to update the firmware using Mission Planner by selecting the “Rover 4.0.0 Official” Icon.
Yes, this is called differential thrust and can work. Do the motors reverse direction?
Thanks so much !!
No i have two ESC whithout reverse
OK. You want to configure this for skid steer but most skid steer vehicles have a center throttle neutral and forward/reverse to turn the vehicle so its the default configuration. This will not work for you. You need the mid throttle to be trimmed low.
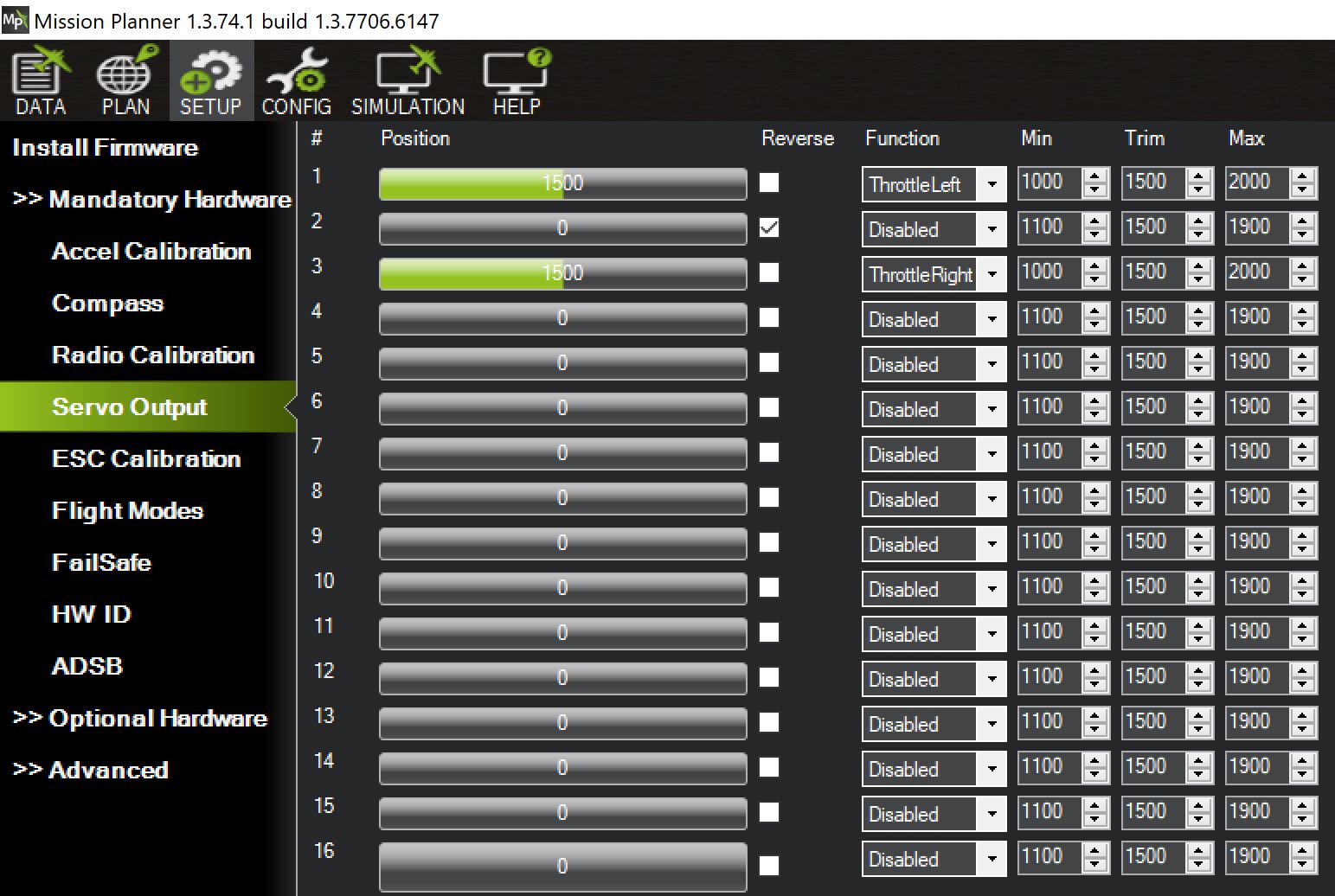
This will not work (default):
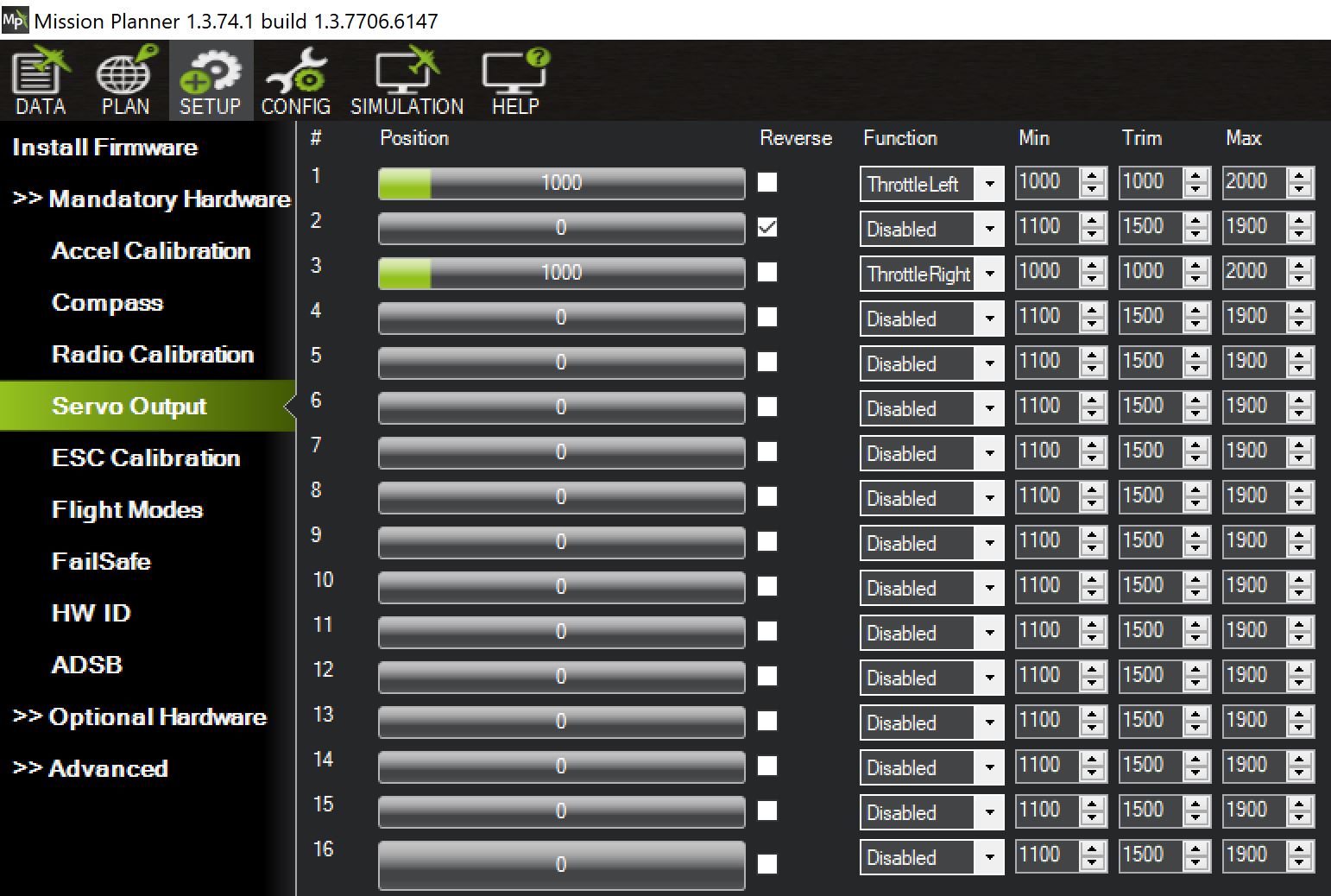
This is what you want. Set this with the SERVOx_TRIM parameters:
Connect your Motor Left ESC to Pixhawk Main Output 1 and the Motor Right ESC to Output 3
Thanks so much ¡¡¡
I will do that and if i have any question i come here to resolve
Thanks
one question please
Should be cut the red wire from the ESC to Pixhawk?
Yes, you do not need to connect it.
Note: There is some question about the advise I gave you above about setting the Trim values to 1000. Try it this way 1st and see if the motors function correctly.
i don´t test these one yet.
now i have other question i just installed the pixhawk in boat and put bouth ESC, but i have a contius bep bep bep bep, and nothing happens when i move the Joystic
thanks
What ESC’s do you have?
I would guess those are setup for Forward/Brake/Reverse with the Brake on/off as an option and you probably can’t change it to Forward only. If so they will have to be ~1500us for “neutral”. This is probably why they are beeping. Set the throttle in the middle and try again.
Also, don’t set the servo Trim to 1000 as I suggested above, leave it at 1500. You will probably need a mix on your radio so that low throttle is at 1500us. I don’t know what Radio you have but this is simple to do with weight and offset on the throttle channel. At least that’s how I do it.
Hi and sorry for the inconveniencie and my poor mind
I have a problem now i try to arm the pixhawk, whit my Fs-i6X after the switch board press and i nothing happens i am realy lost whit all in these moment
Thanks in advance
Do you have a safety switch? Is it enabled? If so have you pressed it?
yes i have, and i also have a blue light blinking just waiting for arm, then i move the throthel down and right, for more than 5 senconds and nothing happens
Hi
Just i need some information,
I can arm from mission planer, but not from my flysky. I have the switch and the arm checks disable.how i can arm from my flysky or what is the problem?
when i arm from Mission planer i can move the motors but i don have the corret configuratión, i have ouput 3 motor Right servo configuratión throttle Right and Oput 1 motor left servo configuration throttle left, i have mixed (ch3master-ch1 100% 100% ) i move the motors but not sincronice… what is the problem? Which one is the corret configuratión for deslice power betwen motors
I need help Thanks in advance!!!