No idea, it may simply be that you have the props off
Hello @andyp1per ,
I have solved the Vibration problem by adding Aluminum plate in the middle of the frame to make it more rigid. I also add vibration damper. However I have another problem about the Battery remaining Indicator that shows very fast current consumption which is NOT consistent with “battery consumed” indicator on the same display. Any idea how to solve this problem? I have tried to increase the total battery capacity parameter, but problem still exist.
I have created new thread about this Battery Indicator Problem here:
Looks a lot better. Y is tracking the best so you could try setting FFT_HMNC_PEAK = 5 to track the pitch axis exclusively
LOL
Ok, will do that. You think i can keep it like this now?
I can’t see anything obviously wrong with the log other than my bad algorithm
Should i keep the notch on or turn it off and wait for your next iteration? 
Keep it. But please can you turn on batch logging so that we can see the noise.
set INS_LOG_BAT_OPT= 2 ??
Yes, but also INS_LOG_BAT_MASK=7 for a Cube Orange
INS_LOG_BAT_OPT= 2
INS_LOG_BAT_MASK=7
Anything else? I got a bit lost on the wiki about collecting vibration samples.
I am not really sure if opt 1 or 2, 1 is prefilter and 2 is post?
The settings you have there are correct
Ok great, will try to make a flight as soon as the snow melts
Thank you very much.
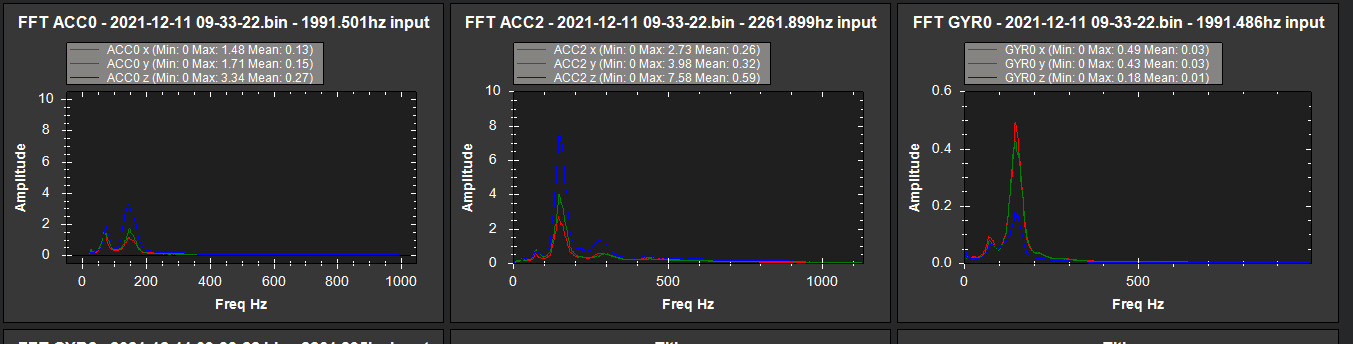
My FFT file from today - It was gusty but I don’t really think that should effect FFT.
The results actually look like they have gone backwards, Copter 4.1.1.
Kindly
Steve
Link to Bin below
This should be off-topic when asking but it is very nice if some of you guys can have some time to point out the differences between these 2 parameters:
- INS_HNTCH_ENABLE
- INS_NOTCH_ENABLE
I have been used INS_HNTCH_ENABLE and examined the imu batch log so far.
Moreover, there are something I can not find in my log such as SnY, SnZ…
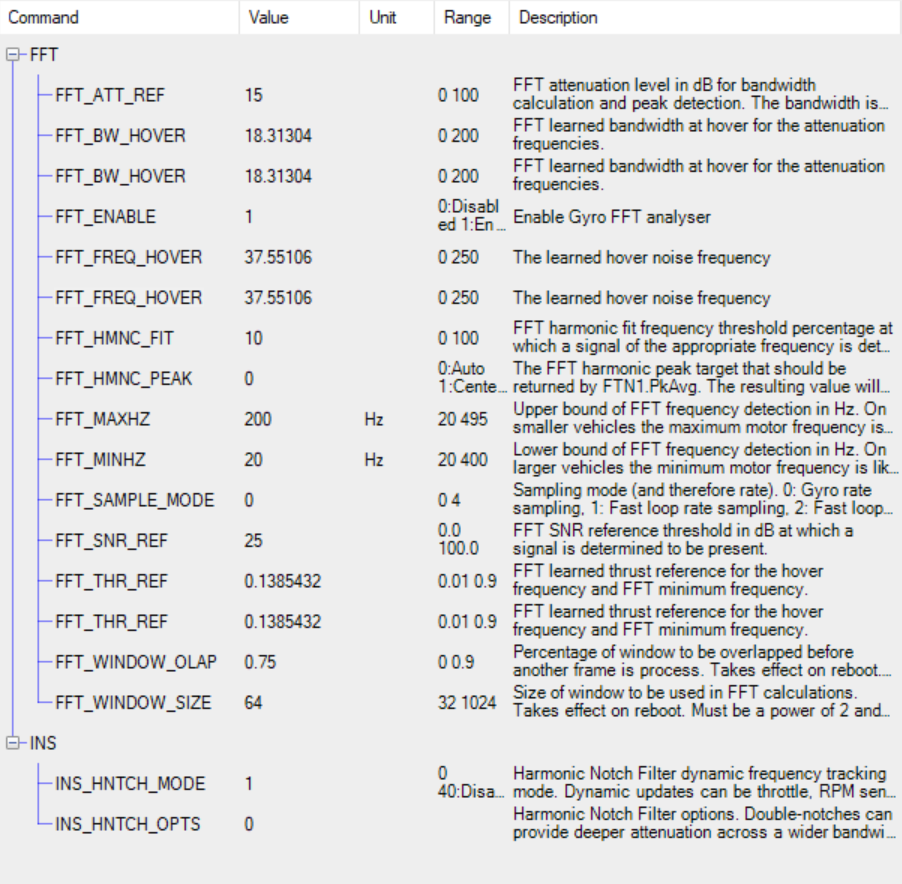
This is my FFT config:
Sample log file: https://drive.google.com/file/d/1AeC3pDAwHfZdnwQbEoiEvbVkVydomkrn/view?usp=sharing
It is highly appreciated if you can point out where did I get wrong.
Thanks in advance.
Vu.
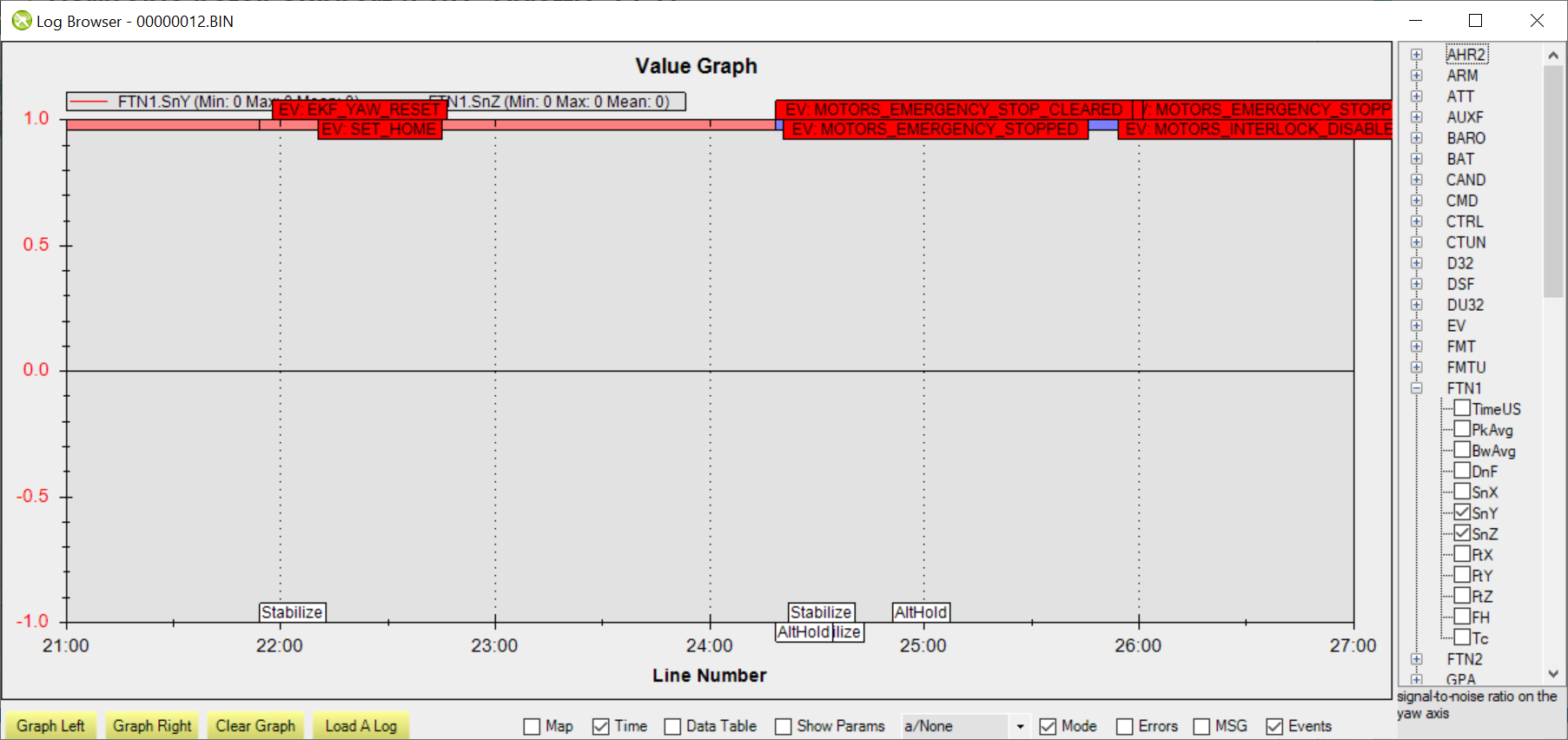
First notch is tracking the 160Hz peak well. Second notch not so much. It doesn’t look much different to your previous results however.
I think the real problem here is that it is bouncing between picking up 2 and 3 peaks (FTN1.FH) and that makes the tracking harder.
You are probably missing a bit from LOG_BITMASK
Thanks Andy,
Do I understand correctly that FFT is learning, I will recheck that I still have log enabled =7
Steve
Here is the current mask
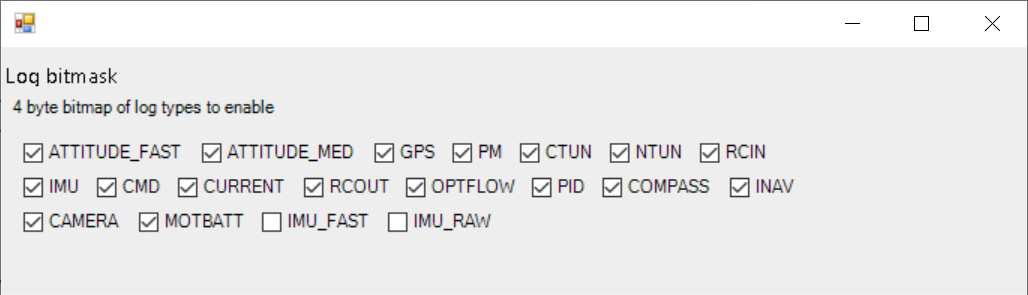
Should I check the IMU_FAST?
Howabout the IMU_RAW, shouldn’t it be checked like this wiki recommended? Managing Gyro Noise with the Static Notch and Dynamic Harmonic Notch Filters — Copter documentation
No that looks correct. What MCU is this on? Are there any startup messages that indicate the FFT is running?