@andyp1per
Hello Andy, made the mods you asked and flew. I think it is better but some spikes still present, don’t know if it is ok.
thanks
@andyp1per
Hello Andy, made the mods you asked and flew. I think it is better but some spikes still present, don’t know if it is ok.
thanks
Looks a lot better. Y is tracking the best so you could try setting FFT_HMNC_PEAK = 5 to track the pitch axis exclusively
Wich value is the tracking by axis?
Look in the log for FTN2.[n].PkX/Y/Z - [n] should be in energy order
I think i didn’t understand wich one to look at. Anyway will follow advice and set FFT… = 5
Do i have to do something else to see if it is working?
Look at the notch frequencies FTN2.[n].DnF - you are wanting a smooth response rather than it bouncing all over the place
FTN2.DnF shows a big band across the whole flight large from 100hz to 200 hz. Can’t you see the same? I am using apm planner to look at logs.
You can’t use APM Planner, it does not understand instance values
ah ok will look at them in mp than.
This is log of second flight, didn’t change anything and it looks much worse, i’d say same as the one of last week before mods.
Yeah you are right, so I guess don’t use that setting then 
It was same settings as the other log, didn’t use Y axis only yet. Same everything much different results.
Ok, in which case I wouldn’t bother with FFT_HMNC_PEAK - the current settings are more likely to work over a wider range of scenarios
Ok, so I think what is happening is that it is picking up only 2 peaks a lot of the time (look at FTN1.FH) and its clear that the energy level on Y is marginal (look at FTN1.SnY). The threshold is set to 25, try lowering it to 15 (FFT_SNR_REF = 15)
I set peak in auto as it was before and treshold at 15?
Yes
More words, more words
Don’t see much difference in energy level per axis, x and z are around 55, y around 40, in FTN1.
Would it be better to set notch filters at fixed values instead of using dynamic fft to set them?
Hello @andyp1per ,
My Quadcopter have strange vibration motor problem on the ground before installing propeller.
I suspect the vibration arise from the “wrong” parameter setting of my Arducopter (latest stable version), but I don’t understand what is root cause of the problem.
The motors are good with no vibration when I did running test using servo tester (Motors already installed on the Tarot 680 pro Frame when I did running test the motor using servo tester).
So the vibration arise during testing on STABILISED MODE and Throttle still lest than 30%. Vibration disappear when I increase the Throttle higher.
I did RADIO (R/C) Calibration and ESC Calibration before doing the testing.
I did the Alt A : Initial Parameter setting according to the documentation.
I did hover test on this condition, and it hover good, but visually I could see that there is vibration problem.
Here is data of my Quadcopter:
Could you advise what are possibilities of this Vibration Problem ?
Here is the bin log file.
https://onedrive.live.com/?id=5F767B9E38DE7C1D!109&cid=5F767B9E38DE7C1D
Thank you very much for any advise.
Hi @andyp1per ,
Thank you for you quick response… Yes you are right, but the Big question is what is the root cause? I add more info here, that there is no vibration when I use servo tester to all 4 motors running simultaneously. The motors are running smoothly, frame is rigid… Then This is The Key: When in Stabilize mode (without propeller) Motors are NOT running smoothly (when throttle below 30%). This generates Vibration. This NOT normal. I never have this problem using previous Firmware… This my new built quad. I just finished Two similar quad and have same problem using the latest stable FW… So I suspect there is something wrong with parameter setting… Could you please check my parameter setting?
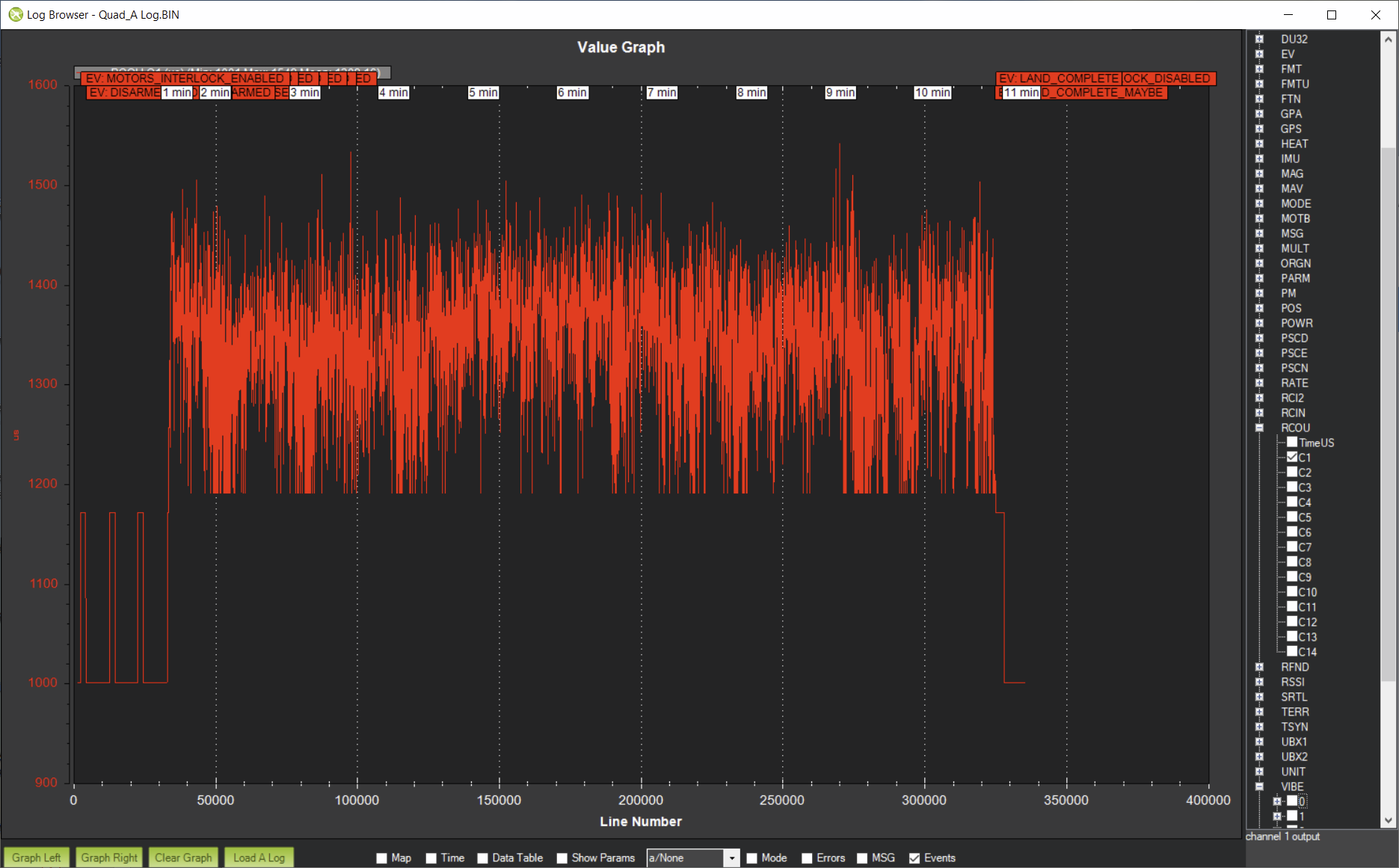
From that graph, it looks like the signal transmitted to the Esc is not smooth. Why ?? Is it because of the R/C signal problem?
Thank you…