When using the ESC settings, the only thing that would make the RPM and frequency mismatched would be if the number of motor poles was set wrong. However the noise we see here matches the expected frequencies for the 24inch props, so I think everything is set correctly.
2 IMU’s are damped, and 1 IMU is undamped. The ICM-20649 is mounted on the main board (not the carrier) and the others are on the isolated IMU board.
IMU1 is clipping, and the Z axis vibrations are still a bit too high for comfort.
The IMUs are all giving believable readings, so there’s no point in disabling any one of them - there’s still an external physical problem.
I have tried everything that is possible to get the vibration low but nothing is working out. I think motor might have off center holes for props or too long arm might be creating flex in air may be the problem.
To assess the problem I lifted the drone and physically vibrated the drone to check what vibration could cause this amplitude and I was shocked that after vibrating the drone very heavily I got above 30. It doesn’t look like the drone is vibrating this much in the air. Might be the frame is the issue but as of now I can’t do anything about that.
Also I asked for IMU damping because when I was reviewing the logs, I checked the vibration from IMU 0 and z vibe was very high same with IMU 1, but when I checked the IMU 2 vibration, it was under the limits even z vibe. After that I get to know that CUAV X7 Plus Pro has equipped with sensors mentioned below,
And one out of these is ADIS16470 which is considered to be industrial grade IMU which is damped. I don’t know If I am correct but I thought that the IMU 2 which is having lesser vibration must be this ADIS16470 sensor.
So, for current state if I have to continue building this drone, should I change the primary IMU to IMU 2 so I can give EK3 more refined readings? Please guide me.
You don’t have to guess, the device ID’s identify the IMU’s and their order. From the last log you posted:
Acc/Gyro-ADIS16470
Acc/Gyro2-ICM42688
Acc/Gyro3- ICM20689
The EK3_IMU_MASK is set to 3 (the 1st 2 IMU’s used).
And EK3_PRIMARY is set to 0 (default)
That frame has problems.
What motors are those? The RPM/pole count doesn’t look right.
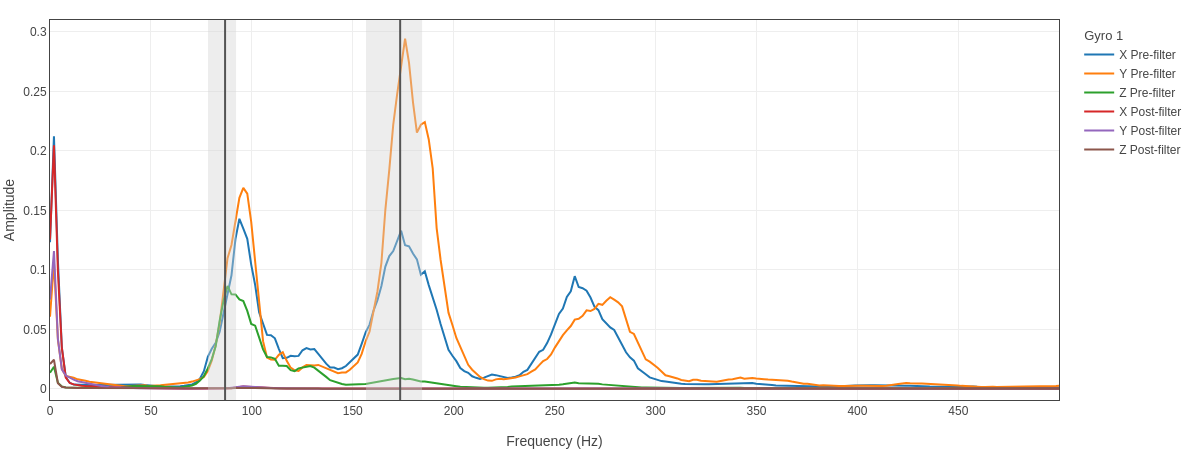
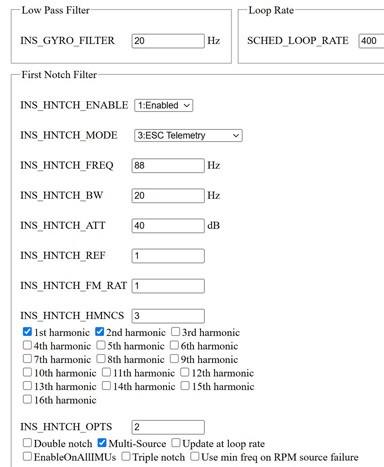
Ah CAN interface. I’m not familiar with that telemetry protocol or how the motor RPM is derived. I suppose when configured with the GUI it should be correct. In any case it looks to me that you can use a simpler Notch filter configuration. It won’t do anything for the mechanical vibration of course but the simpler the better if it does the job. No reason not to use Multi-source with ESC telemetry and that FC. You could even uncheck the 2nd Harmonic as there isn’t much up there. This is on the 33 log. Check out Estimated Post Filter with these and make your own call.
I researched about the vibration and got to know that natural frequency of the material may resonate if same frequency is given by motor. So I thought that If I increased the weight of the drone two things may simultaneously reduce the vibration which are increased downward weight and increased motor RPM (Which may be different from natural frequency of the arm). I took a flight to check if vibrations are decreased.
But to my surprise, the vibration increased significantly even reached 120 m/s/s. Now this frame is supposed to fly at this weight and even, and it is tried and tested model.
Also I want to mention that even at this high vibration, I am not seeing any problem audibly or visually.