Just when I thought I had finally gotten a stable copter, it decided to drive itself into the ground.
I flew today for 14 minutes, attempted a simple auto mission, and aborted it after a GPS error caused some bad headings. then in Alt Hold, the #1 motor stopped dead, the copter flipped, and crashed. Luckily it was fairly low at the time and little damage was done other than breaking my nice home made GPS stand. All of the GPS and compass functionality appear to still be accurate and intact.
When I first armed the copter, that motor stuttered similar to what I have seen in youtube videos documenting SimonK sync issues, but it quickly went away and the copter took off perfectly after that. But I was under the impression that SimonK sync issues affected flat high pole pancake motors, whereas I have NTM 28-30s 900kV’s which are low pole count and not low profile.
Has anyone seen standard shape motors have sync issues with simonk on 4S?
Unfortunately, I thought I was beyond the testing phase and didnt have motors log enabled nor IMU logs enabled, but i do have both the log and the tlog.

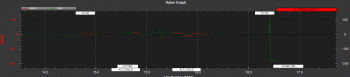
you can clearly see the crash here. the roll goes nuts, and so does the pitch. even the APM knew it was crashing.
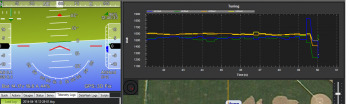
when looking at the tlog, the crash happens around 85% through the flight. by looking at all the ch1-4 outputs, i can see that the APM sent low signals to the #2 motor and high to the #1 motor in an attempt to right itself.
As far as the logs I have can see, the APM is doing its job, and I had a hardware failure, but I am unsure whether this was the motor or the ESC. would anyone with more knowledge than myself mind taking a look at my logs? Is there any way to distinguish between a motor failure and an esc failure? What about a simonk sync issue? replacing both will be expensive…