On my 3rd flight, 1 min in (on a fresh battery), the quad rolled to a ~30Deg angle and plowed into the ground while in position hold mode.
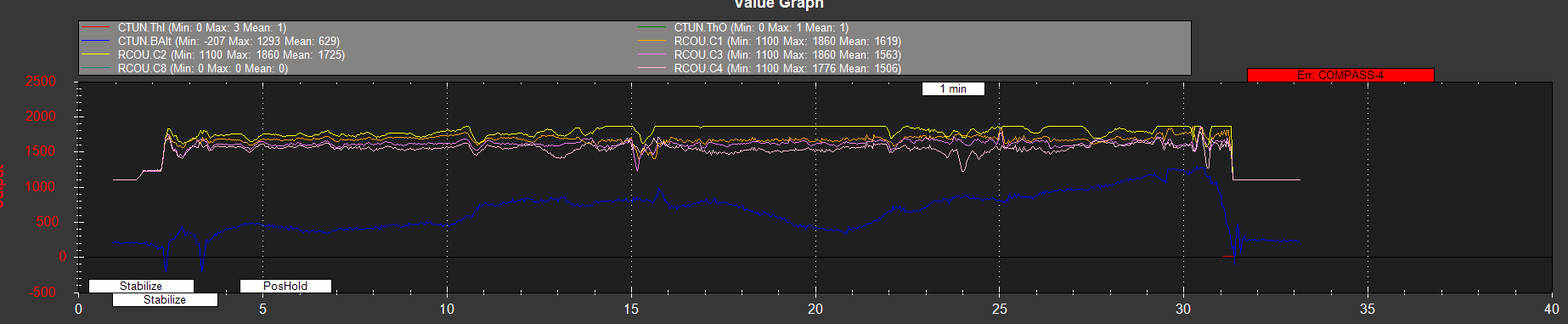
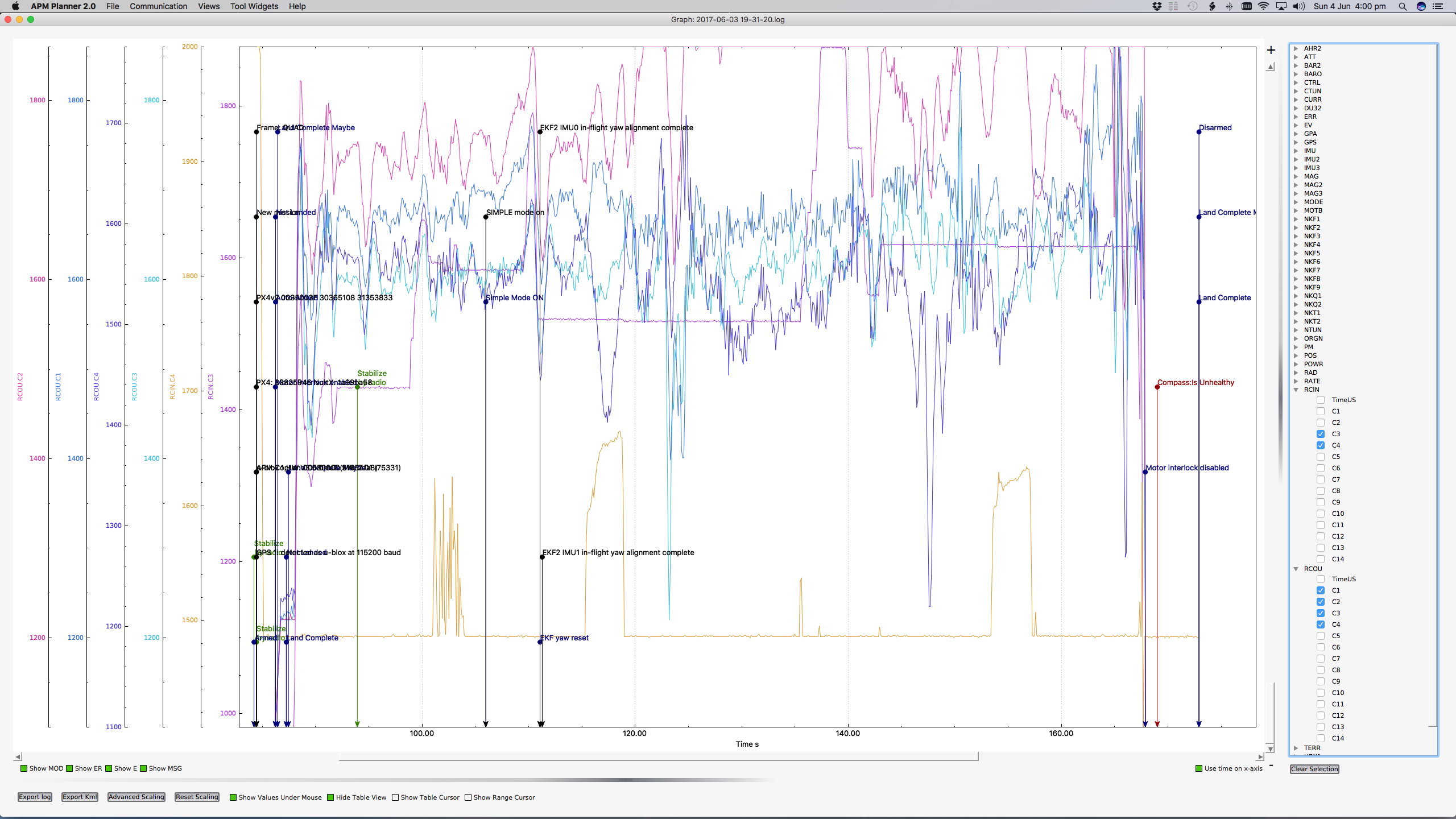
I have tried to take a look at the logs, but quite new to this, but I was wondering if it was some sort of motor failure. Looking at the logs, i note that RCOU (which I assume is the power output sent to the motors?) for channel 2 is maxing out - is it possible this is what is causing the crash, and what exactly does it mean / how do i fix it? Could it be an ESC calibration issue?
Edit2 - May be completely on the wrong track here but tested my transmitter and the max PWM output is 2006, yet the max ROU value I am seeing is 1860 - does that mean the ESCs are not calibrated properly?
Yes, I noticed you had to correct the yaw a few times as well.
Motor 2 is maxing out most of the time.
Also the quad seems to be underpowered/overweight as the motors are all up around 1600/1700 anyway.
Not much room for error.
Have you tested the motors after the crash?
The max output is around 80% or what you are seeing, 1860mS, so no, it’s not an ESC calibration.
Although I asume you have calibrated all the ESC’s.
Being the third flight, was there any indication of a soft or failing motor now you think back on it?
@mboland thanks - couple of quick questions/observations.
1 - This is a new build but I have already flown it about 4 times and not had any control issues, any reason why it would suddenly occur?
2 - What should the standard range be for the RCOU values? I did do a thurst test and was getting ~700g per motor and the quad is ~2.2kg - is that adequate?
3 - Currently using 9 inch props - will larger props solve this problem?
No indication of a motor failure but I do have a spare so will swap out for motor 2 and see if any difference
Hi,
2) Your max thrust is 4x700g = 2800g so the ration thrust/weight is about 1.3. It is too low. It should be 2-2,5.
3) Larger props increase thrust, so yes, it will help. But you have to consider motor power and ESC, if it is able handle larger props. Larger props means higher current.
Maximized output can mean that you copter weight is unbalanced. Check the center of gravity, it should be in the middle (from the top/bottom view). It is more important when your copter is undepowered. Maybe this is answer to your first question. Maybe you mount the batter little out of its position this time.
Motor2 is struggling from the start, so it could be an overheated ESC, failing motor, loose prop, or anything similar.
Ideally you should have 2.2kg of thrust at 50% throttle, so when you say 700g thrust I assume that is at full throttle.
What is the thrust at 50%?
I generally use at least 10" props on a 3S 800-900 kv system.
11" props for even better performance but only with good quality motors that can take the strain.
Thanks for all the replies so far, its amazing to have such a helpful community around this.
I have re-weighed the quad, and my calcs were a bit off. Without the gimbal and camera (but including the battery), the quad comes in at 1,300g - I am going to re-test the motors but assuming I am still getting 700g, it should be adequate thurst/lift ratio.
Question
I cant find any info on the docs, but beyond the RCOU logs, is there any other logs I can monitor to give me an indication of if the quad is unbalanced / overweight?
The RCout is a good indication of how your motors are being driven and you raised a point I skipped over.
How well balanced is your quad?
The separation of the motor out levels indicates an ailing motor OR an unbalanced airframe.
Is motor 2 trying to hold up more than it can.
Don’t forget that the motors need a good amount of headroom in power to be able to stabilise.
If an arm drops and the motor is already at max it cannot pick that arm up.
It actually works the other way as well if the motors are too powerful.
Digging up an old thread but in case anyone comes across this with similar issues.
Turns out this was a faulty ESC. I tested the same motor on multiple ESCs and max thrust was ~30% lower with this one. The ESC was correctly calibrated and changing it for a new one fixed the problem.