Hello,
I’m working on a custom X8 coaxial octocopter build and need advice on finalizing the components. Here are the key project details:
Total Weight (Including Payload): 20 kg
Payload: 5 kg (2.4 kg off-center, 1.7 kg rear, 500 g front)
Endurance Goal: 30 minutes
Battery Setup: 2 x 12S batteries (capacity TBD)
Max Prop Size: 24 inches
Form Factor: Compact for two-man operation
Safety: Requires parachute system
Questions
Motor and Propeller Suggestions: Recommendations for motors and props that handle the load efficiently with the prop size limit.
Battery Capacity How to determine the right capacity for 30 minutes of flight, and suggestions for reliable brands.
Configuration: Is X8 the best for my uneven payload, or should I consider another setup for better stability?
Parachute System: Recommendations for integrating a parachute with Ardupilot.
Any insights or suggestions would be greatly appreciated
I find the X frames tune better and work better.
H format frames usually have a more noticeable difference between pitch and roll and exhibit odd attitude control that’s hard to tune out if there is ANY discrepancy in frame geometry or stiffness.
There might be some H frame fans out there that would disagree with me - I’ve only met a small number of H frames.
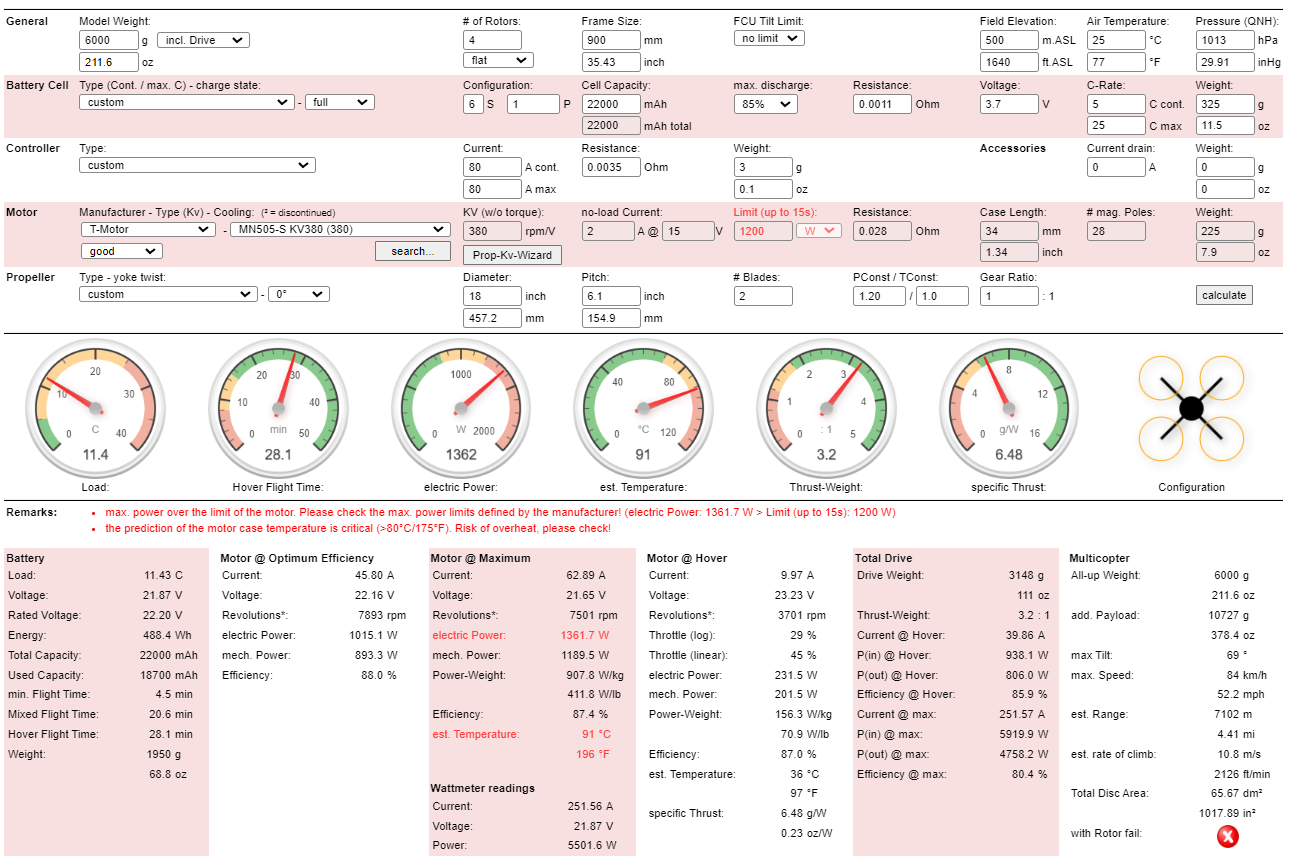
How is the power delivery being calculated here ? By the means of battery, or weight i am confused in this, also what is this additional payload when i am getting my all up weight.
I am confused in power because these motors seemed fine for my 60 min endurance quad but i am not quite getting that so i am not able to tell why this power error is arising, how to solve this without charging the motors