I misread the instructions – started the HEQ app, clicked on the ‘H12’ item, then assumed the app would set up some settings and could be exited. No, the app needs to keep running, then MP and QGC will work.
ok, this HEQ app is working… but, MP is very slow… QGC is better, but how is the secret ? how HEQ works ? I like to do direct connection, no using HEQ app… UPD don’t work to h12, off course exist internal direct connection between radio and android system of h12… I was request support from skydroid team… why made exclusive radio ? skydroid is radio fabric or flight system fabric ? lost my time !!! soons will test h16…
any one have solution ?
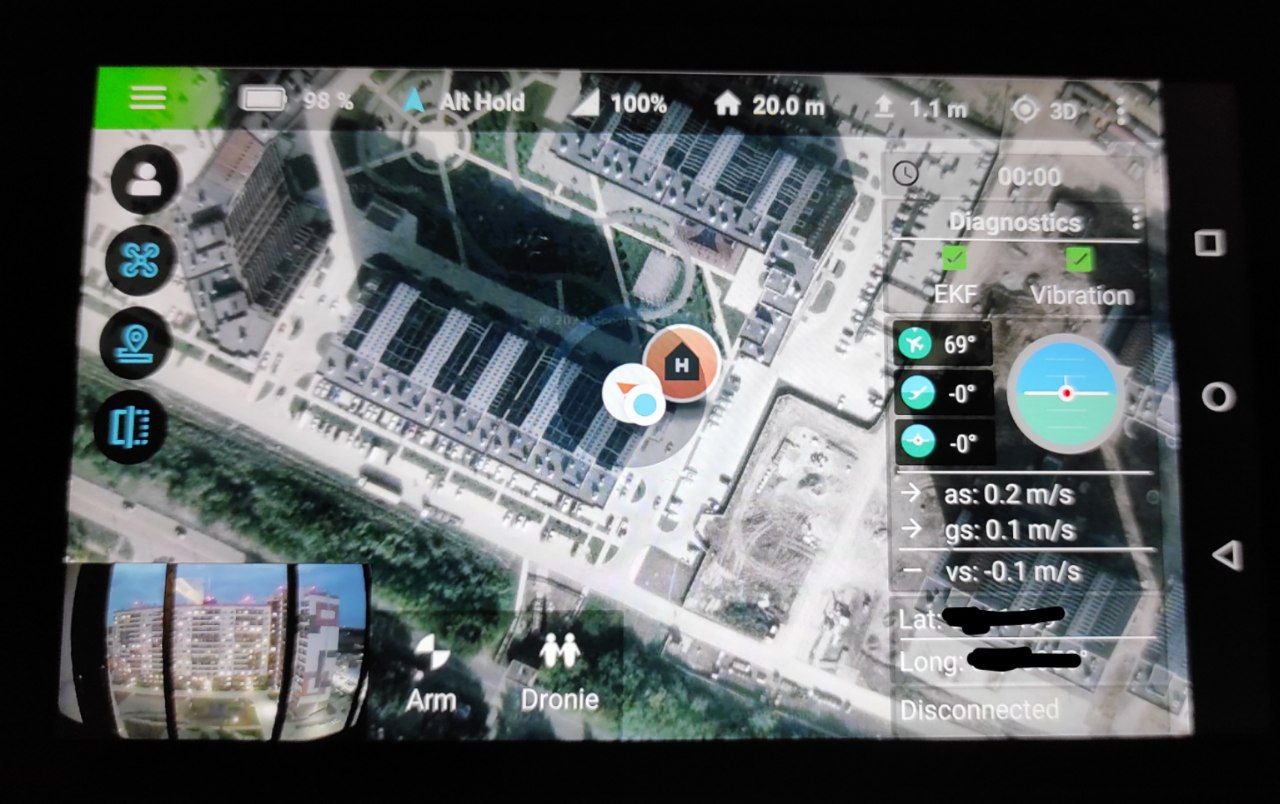
QGC & Mission Planner work normal on H12 (with HEQ app).
Yes, it’s important! In the receiver settings, it’s necessary to have a baud rate = 57600 bps for telemetry … I had 115200 bps from the factory on one of the 3x RX …
I just can’t get video from my native camera via RX Skydroid:
Not work video stream in MP, QGC, Skydroid Tower.
Any ideas?
UPD: First time I see that FPV camera requiring additional external power:
Video work:

Anyone have a successful use Auto missions and other Flight modes in Skydroid Tower with Ardupilot firmware?
1 Like
I am facing weird issues with my Skydroid H12.
- With or without connecting any telemetry cable, the H12 frequency matching is not working or fails. The Baud rate is at 57600. (Kindly share the correct connections of the Receiver to the Pixhawk/cube telemetry port) or let me know if no such thing is required to be done.
-
However, the motor turns on and operates easily on a bench test.
-
I could not connect with Mission Planner, after adding the HEQ app. it is connecting.
-
The channel mapping shows accurate PWM values when HEQ app is not open. The moment HEQ app opens up, the PWM value doesn’t respond 95% of the time and in 5%, there is a huge lag.
-
The motor operation direction, ESC calibration, etc. are all fine. However, while flying, the drone is going anywhere randomly. It listens to the RC, of course, so it does take off. In moments, it is not responding well to the controls - left-right, forward-backward. Also, not landing properly. Almost a hard landing.
-
I get the live feed on H12 tools - video view. However, want it on the mission planner app.
-
Yes. Mission planner app. lags.
-
Not able to connect drone with mission planner on the laptop (while H12 on)
-
Has anyone tried to connect it with a camera other than skydroid camera? If yes, which camera and how it connects?
Requesting one and all to share their experience and help resolving the issue
Thank You
By starting the HEQ app, pressing the H12 button. Leave the H12 app be, and then start (I assume any) ground control Software connecting by UDP: Yes. It is a hack. Not pretty. But it works. But also sadly only for a short while.
After 30 minutes the interface enabled by the H12 app shuts down. Now obviously… The GCS can be disconnected, the H12 app then closed and started again. In the middle of a mission, mind you. But yes, then you may connect once more and get the next 30 minutes.
I am testing the H12 for use in a boat. Then 30 minutes fly time is not raising any eyebrows, we run missions that may last for hours. 30 minutes working time further seems to be a consistent behaviour based on my and others experience. My suspision is that this behaviour may be as intended by the HEQ H12 app developer.
Disabled battery optimization. Allowed unlimited background threads. It makes no difference. Any suggestion for other possible mitigation that extend the fly time would be highly appreciated.
1 Like
With this shutdown of the app, a GCS failsafe will occur. And GCS failsafe is something we cannot avoid especially if it is about flying things. Even your boat, it will be Returning back to its home position.
That is a really big issue. Did not like Skydroid for this.
Absolutely agree (even though you may disable failsafe for GCS). Sadly such nice hardware becomes totally useless when info on the needed APIs to properly use it is not shared with GCS developers.
1 Like
Estou acrescentando aqui os arquivos de implementação da camera do H12, talvez como ideia possa implementar a conversao da imagem de video para rtsp para ser inputado dentro do Qgroundcontrol
H12数传图传SDKDemo:https://gitee.com/skydroid/SkydroidH12Demo
H16及H30安卓开发示例:https://gitee.com/skydroid/SkydroidDemo
适用于T10,T12,H12,H30串口连接方式:https://gitee.com/skydroid/SkydroidFpvTest
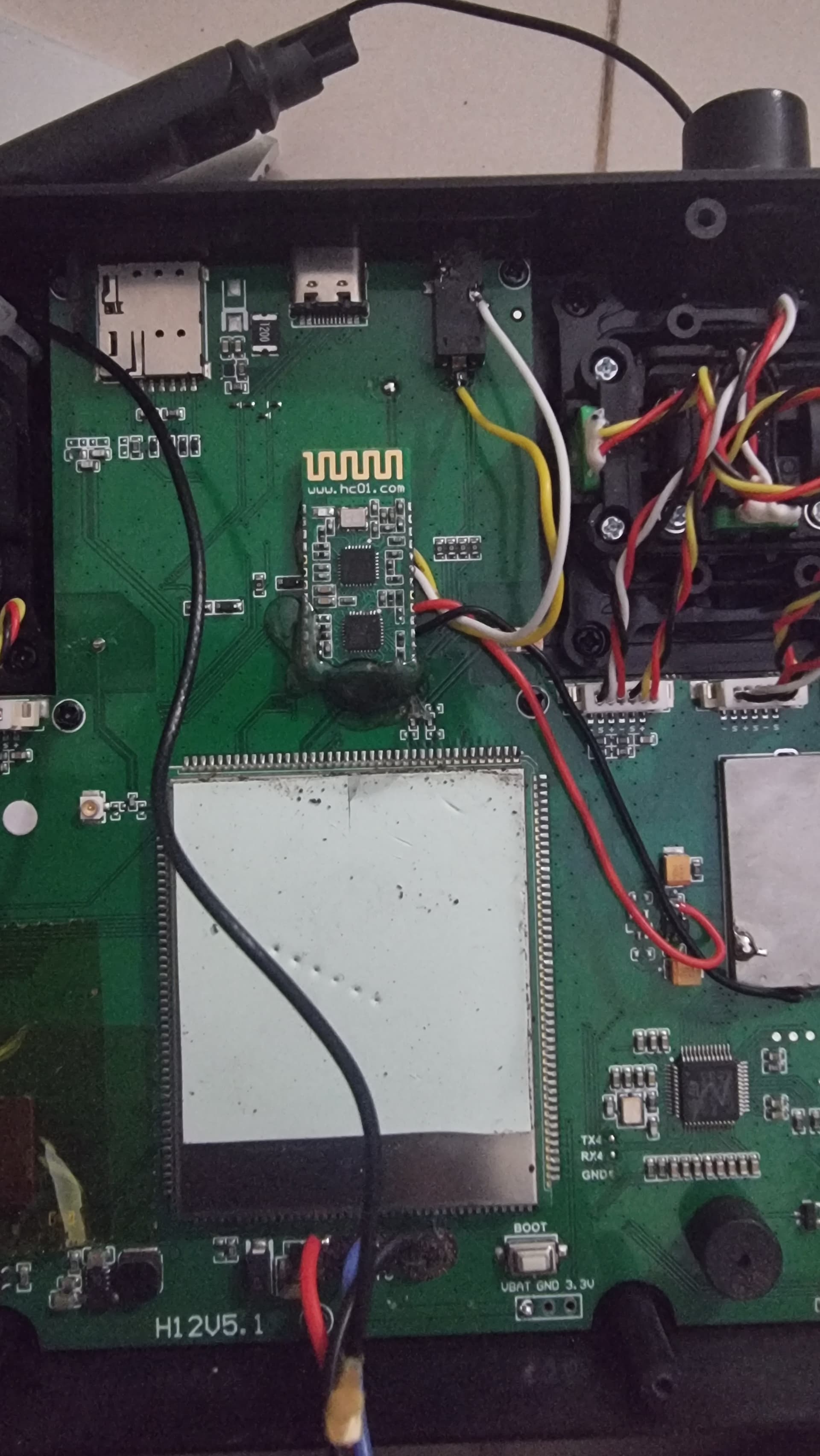
-skydroid h-12 Bluetooth")
1 Like
Thank you so much. I successfully connected with your method. This is actually a plus for me because can even use 2 phones for video and QGC.
1 Like


Just to add to my early post that we need to set bautrate of Bluetooth module to 115200 or it wont work.
what is the Point of Updating this to Google Version ?!
If don’t see point, don’t update ![]()