Hoping someone might have some insight. I am trying to set up a new FC ARKV6x and managed to calibrate accelerometers and do 4 or 5 test flights (very short low altitude).
however, from the start I received pre arm gyros not calibrated… Typically use MP, but managed to clear this in q ground station (ardupilot frimware latest stable release installed) and get a notch filter hover in, however I havnt been able to clear this preflight error to test the notch filter. when trying to recalibrate the accelerometer’s in mission planner (3axis) I am not prompted to place up, on right ect… none of the accel methods appear to work.
Any help is appreciated… no log because It hasnt been armed in set up, though I do have one from the last flight I can post if it will help
Pre arm gyros not calibrated usually means the aircraft was not still enough and eventually timed out waiting for movement to stop.
Calibrating Accels again wont help that.
Do you think the aircraft is sitting still? Or is it possible unsteady and wobbling somewhat after power-on?
You could set LOG_DISARMED,1 and that will generate a log for us to check over.
Set LOG_DISARMED,0 after one or two logs are generated showing the problem.
When an aircraft is known to be moving during power up, there is “boat mode” which is not really a mode, where gyro calibration is ignored. INS_GYR_CAL,0
I would avoid using this though, as it will just be masking the issue and may lead to bigger problems if the flight controller does have a fault.
I tried setting it up on macadam and also in open field…
here are 2 logs 2 Items
Thanks for looking… here is the previous log of the short hover flight when I was able to clear the gyro issue with QGC 2023-11-06 16-43-56.bin
You could try one last thing, which may only be a work-around rather than a proper fix: BRD_BOOT_DELAY,3000
Let us know if that helps or not.
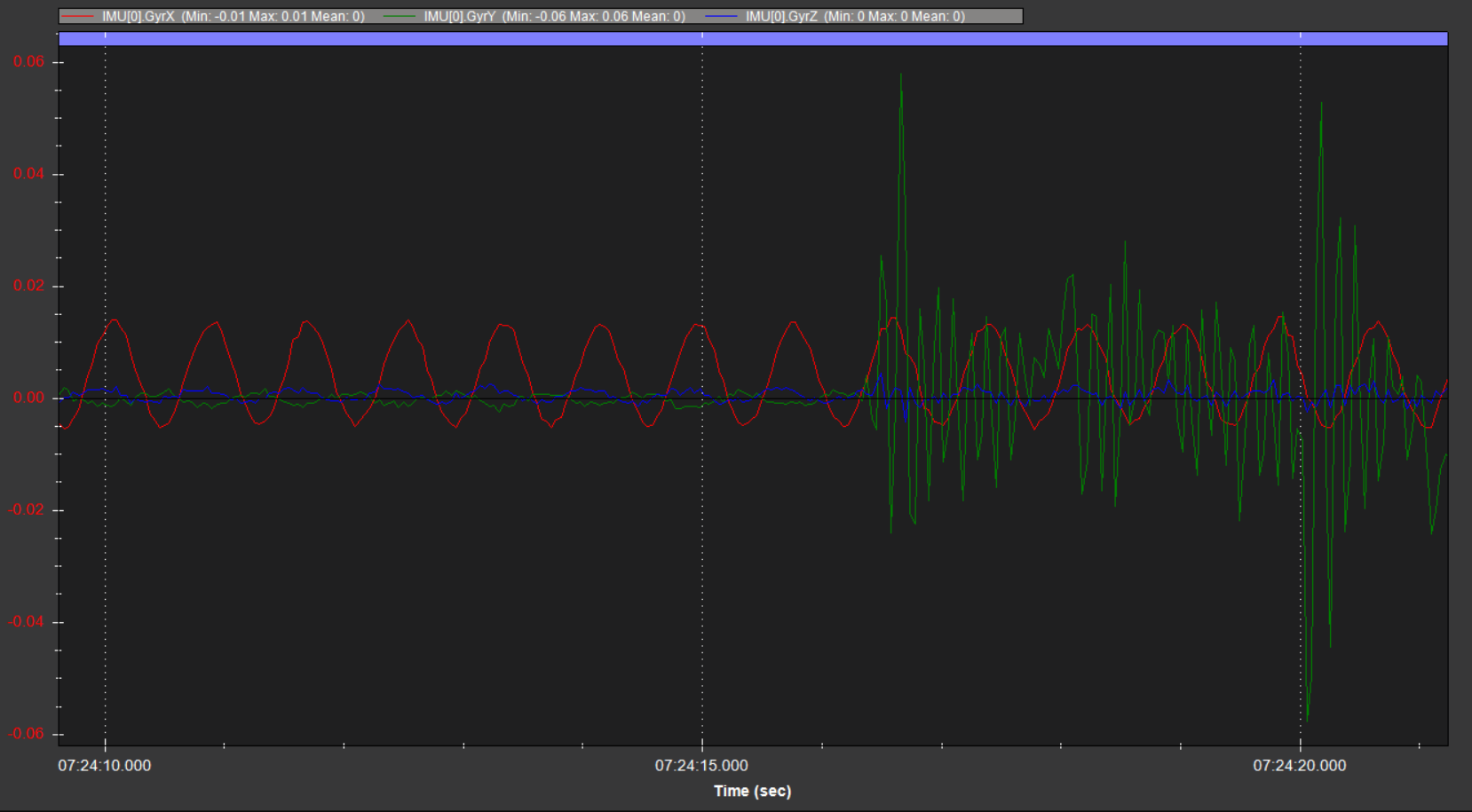
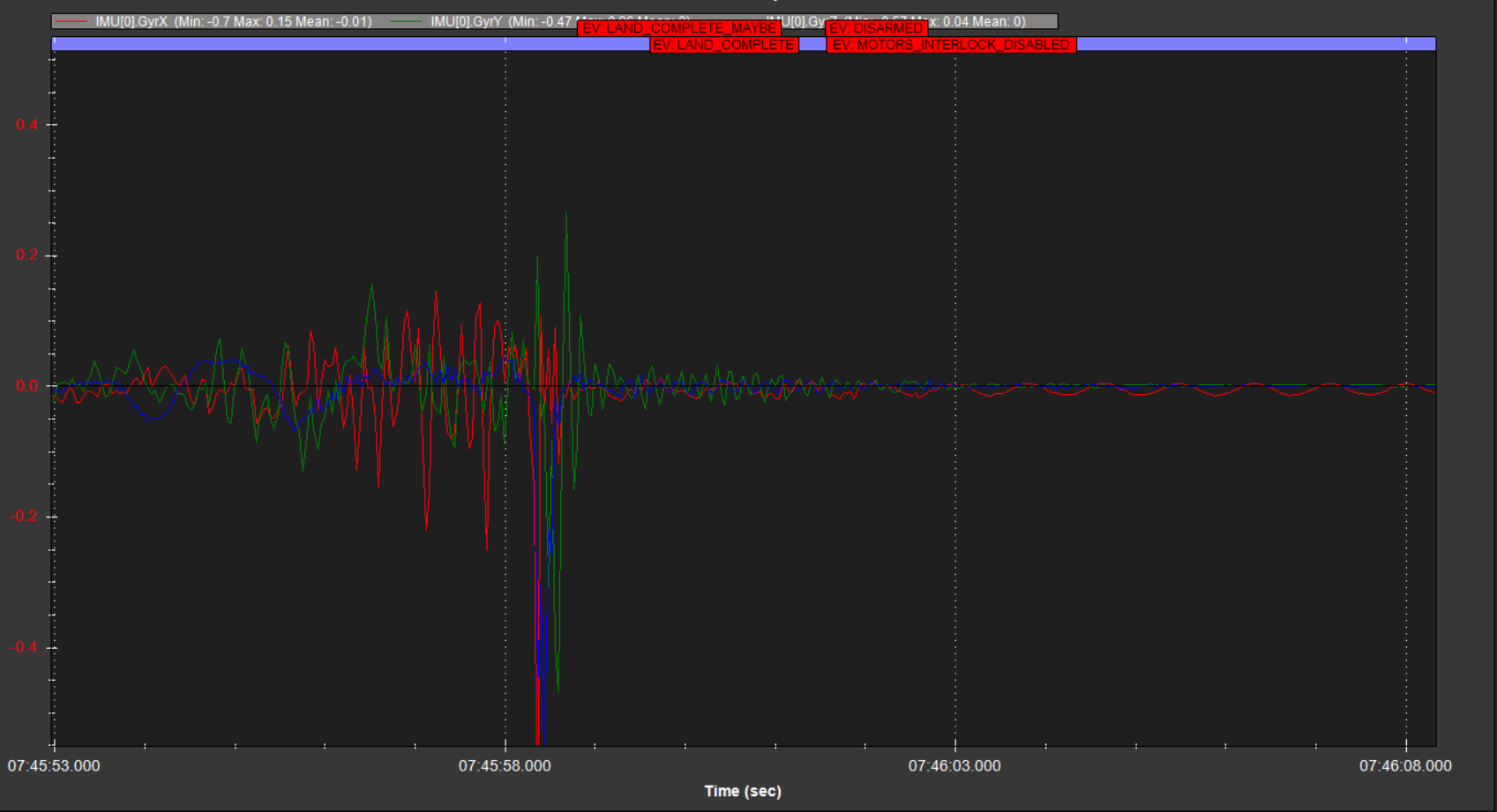
In both those logs it looks like IMU0 Gyro X axis is not responding, and showing an oscillation.
You can see where you move the copter and Y axis responds OK but X doesnt. The other IMUs dont show that issue - they dont have the oscillation and they respond reasonably to movement.
I updated the parameter… same result “pre arm failed Gyro not calibrated”
I can post a log if you want but the gryos still has same issue…
Manufacturer has been very helpful giving me his time to initially set up with PX4 (flew several very short flights at his shop) then switching to arducopter due to camera issues… again several very short flights at his shop and back home Gyro warning was there but would clear on re-boot… Manufacturer now suggest using PX4 firmware to see if the gyro responds differently as no issue was seen in earlier (short) flights… I will update if the PX4 is able to clear the gyro warning
I’m not sure why Ardupilot isn’t able to calibrate the gyros. This unit passed test and the data in PX4 looks good. I don’t know enough about Ardupilot to debug it.
I don’t see anything in the parameters that would produce this like AHRS type set to 3 and running EKF2 for example. This isn’t a common Flight Controller so few examples but I wonder if there is something in the firmware causing it.
AS Alex mentioned… we flashed the PX4 firmware earlier today… powered up the drone and sent a couple logs… no gyro messages or issues were seen.
I have just re-flashed arducopter (using new firmware Alex pulled) to the board and ran through a basic set up page
attached are a couple logs from the initial set up… no gyro error to this point 2 Items
crossing my fingers and thanking all for their help
Mike