I’d like to say that it wasn’t my intention to present a fully fletched-out solution, I just wanted to point you to a well known concept which appears to be perfectly made for your case and which is used in many areas with much success. That’s all. You obviously are not familiar with the concept, so some additional words, but I consider the rest your job 
The basic idea of using a rotating frame is, in physical language, to separate fast time variations from slow time variations (there are of course many applications of rotating frames, but that’s a very common one, and the one relevant here, hence a bit of simplifying here). It’s actually a very simple concept and widely used in all sorts of incarnations, and in your case it just means that your blades are rotating fast as compared to the other variations, such as e.g. to yaw, or to pitch, etc… That is, the basic condition of a fast rotation and a slower variation in this rotation is met in your case, and hence using rotating frames appears as a natural candidate.
Since it’s just a transformation you are not losing (or gaining) any information, which invalidates your 1st objection. Of course you would get phi_0, as you do get all other available info (I predict that you actually will find that you won’t need phi_0 explicitely anymore, since it’s all in w(t).)(again, FOC is a perfect, practical, simple example)
Since the variation of the rotation frequency is slow as compared to the rotation, transforming data into the rotating frame does not add noise (except of the noise due to doing numerical calculations, which is obviously unavoidable whenever you do numerical calculation, and is handable), which invalidates your 2nd objection.
Since all Kalman filtering and control would be done on the slow-varying variations, everything would get much more stable, which invalidates your 3rd objection.(again, FOC is a perfect simple example)
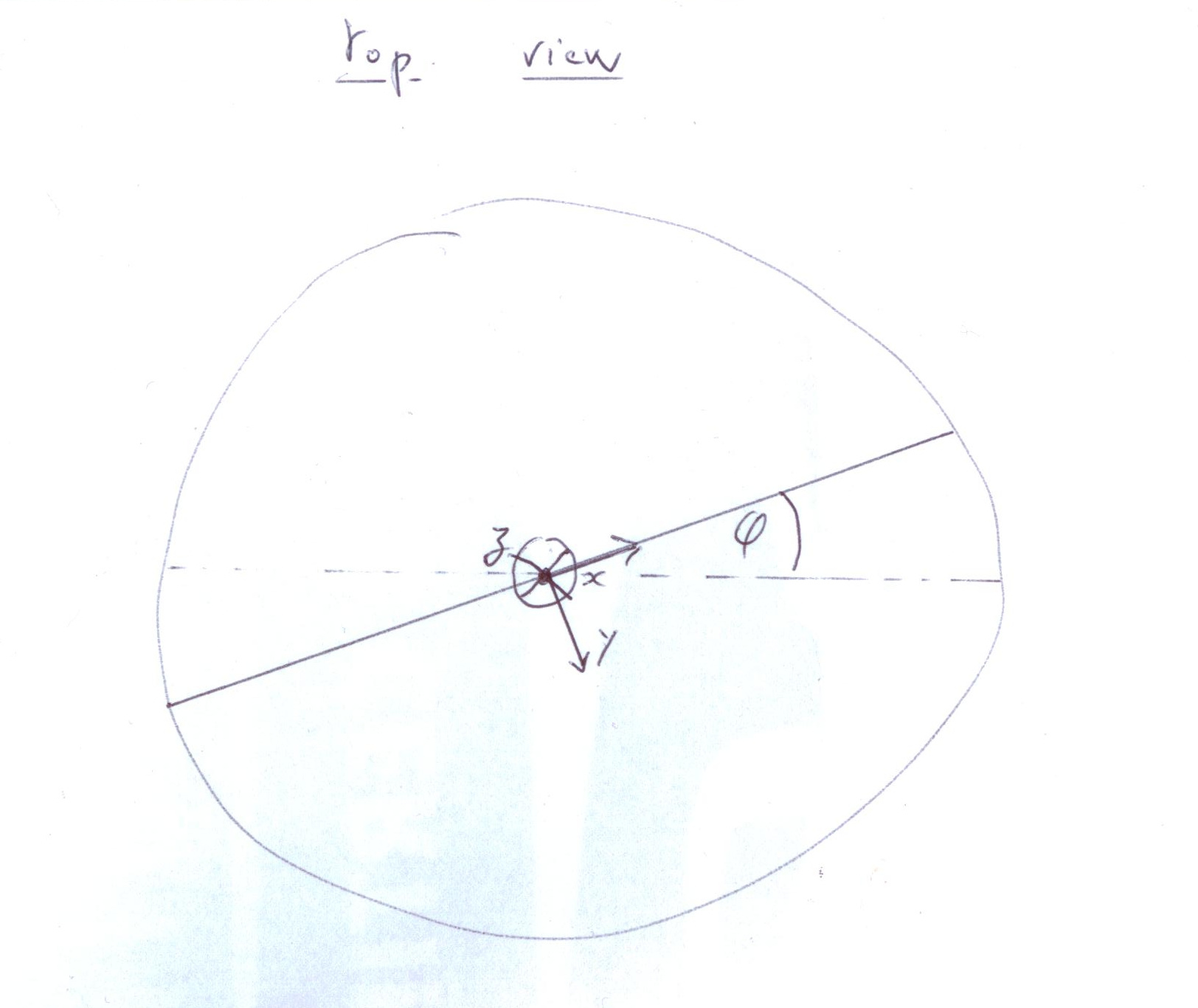
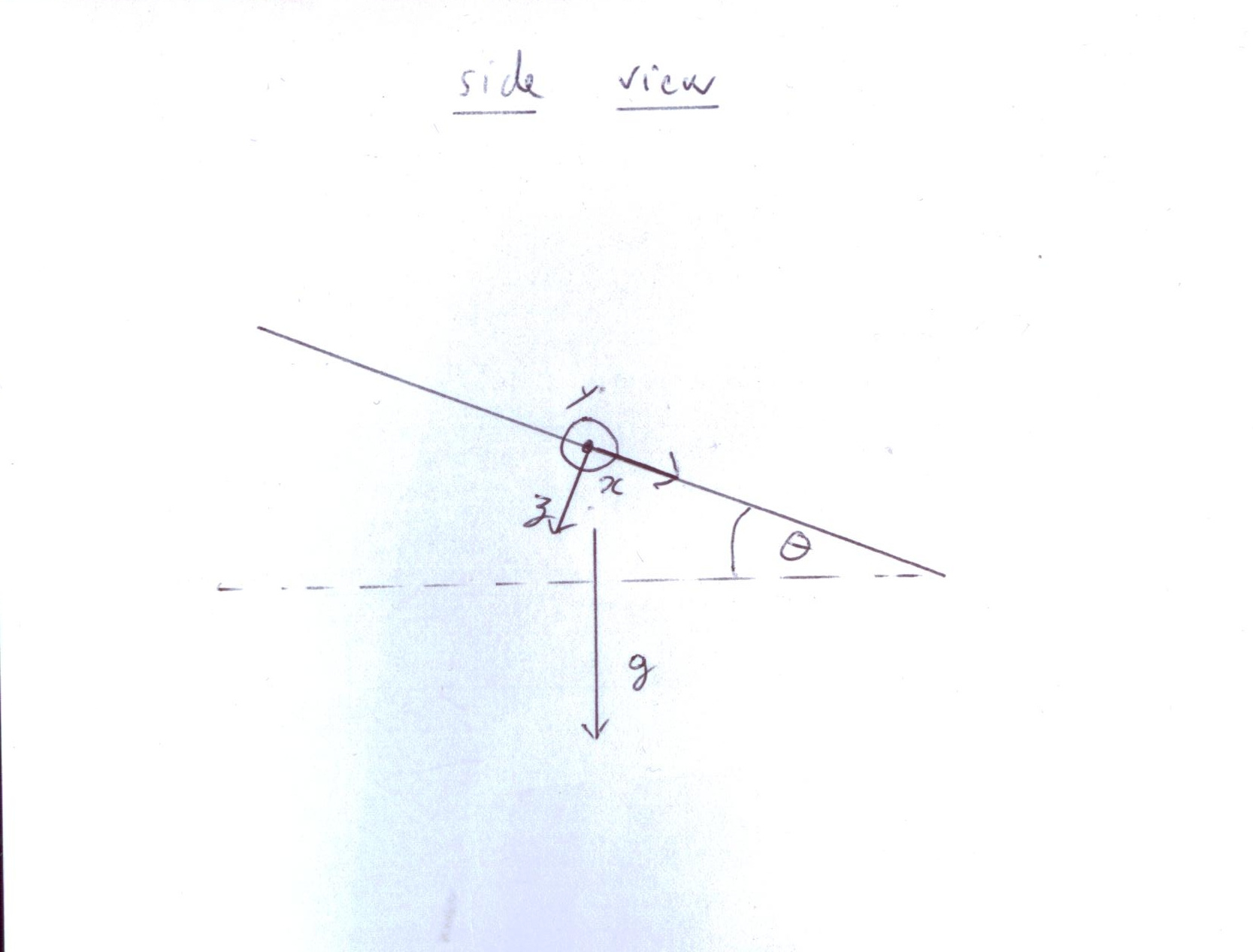
Since your system lives in 3D and not in 2D as for e.g. in FOC, there would be several options to chose the axis of rotation of the rotating frame, e.g. it could be chosen to be fixed in earth coordinates, or to align with the (estimated) axis of your blades. A priory it would not be obvious to me which choice would be better, so this would have to be analysed. The first suggestion would correpond to your choice, and the rotated variables would be simply
vx’ = cos(wt) vx + sin(wt) vy
vy’ = -sin(wt) vx + cos(wt) vy
vz’ = vz
where w would be slowly time varying, w = w(t), and v would be any vector variable (a,v,x,…). You might note the substantial generalization as compared to your Ansatz. But as said, other choices for the axis might be somewhat better. The Kalman and control would be done on the transformed variable v’, which you may note is a slowly time-varying function v’(t). The rotation frequency itself you could get e.g. using an observer, very similar to what is done in encoder-less FOC (I assume it’s obvious that an observer is a more profound concept for estimating w than e.g. a Fourier transform).
As simple as that. Any introductory text on FOC will explain you the advantages of working with the slowly-varying variables. Looking into e.g. NMR would give deeper insights, since it makes more profound use of that concept, but since you need an engineering solution that’s probably not what you want to do.
As said, the rest is your job. Have fun.
EDIT: going through my folders to find a suitable FOC reference, I actually realized that most introductory texts on FOC do not emphasize the concept well. That’s a bit basic reference which however nicely explains it in simple words: http://www.copleycontrols.com/Motion/pdf/Field-Oriented-Control.pdf, see the paragraph “The important architectural difference…” on the last page. A kind of iconic picture would be this http://www.rroij.com/articles-images/IJAREEIE-1208-g004.gif, there the step from the 2nd to th 3rd plot is the relevant part. Figure 4 in here https://www.nxp.com/docs/en/reference-manual/DRM148.pdf is probably much nicer, this ref might be my favorite on FOC. A bit more physics-related ref would be wikipedia’s article https://en.wikipedia.org/wiki/Rotating_reference_frame, the animation on MR is kind of nice. This too would be a basic intro: http://www.physics-in-a-nutshell.com/article/29/rotating-frame-of-reference, this http://www.maths.manchester.ac.uk/~jm/wiki/uploads/Mechanics/5RotatingFrames.pdf or this http://www.damtp.cam.ac.uk/user/stcs/courses/dynamics/lecturenotes/section4.pdf would be a bit more extensive, all unfortunately a bit too focused on fictious forces, NMR literature would thus be better. All retrieved in few minutes using google :).


{kind=link}