
9 Likes
Hello Henry,
How can get a log from the bin file properly? I used mission planner. and the log the amost twice bigger size than the bin file. is it normal? and gyroflow does not use it well.
I have read it and not sure what did I missed.
yes because its text not compressed binary…and Gyroflow can use the Ap .bin log file directly now
After setting all the parameters as described on Ardupilot and following the instructions, I cannot get the results as shown.
I am using RunCam 2 (Non-4k).
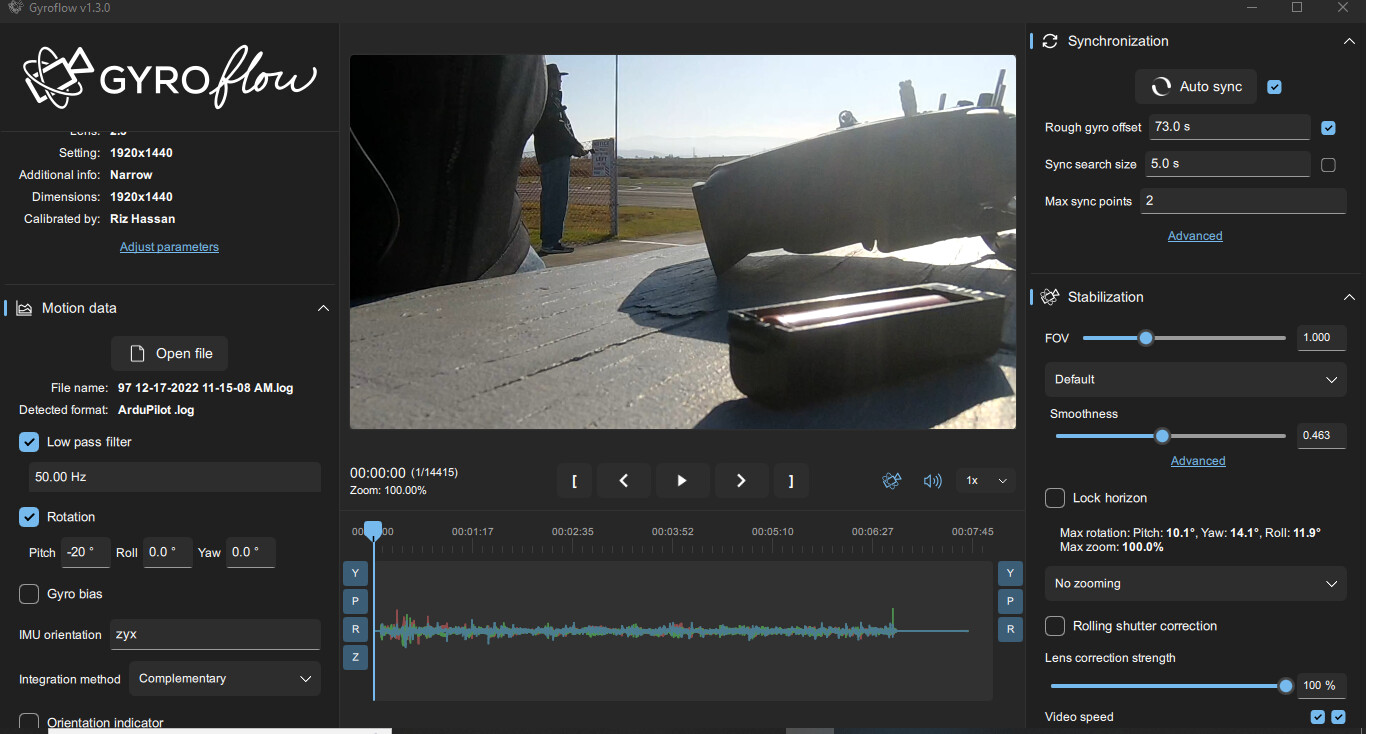
Gyroflow Steps:
- Place the video file
- Calibrated the lens type and placed that file
- Converted the log file to bin file and placed it in the Gyroflow (I am trying direct log in the pic below).
- Set camera rotation to -20 since its pointing slightly down
- Set low pass filter
- Plane takes off after 73 sec so the offset is 73
- Max sync points 2 (should I increase this value)?
Results are worst than the raw footage. I have tried enabling horizon lock etc. without much success. What am I doing wrong?
1 Like
I would try more points for sure…also you can ask for help in the GryoFlow discord channel…
personally, I have not had much success and do not use GryoFlow…for the original article the guys in the GryFlow channel helped with settings, etc. …I almost 100% use the CADDX Peanut or AKASO V50X cameras for stabilized video these days…so I have not continued using GyroFlow on anything…
also, its very important that the flight controller experience the exact same accelerations as the camera, so mount similarities and proximity are important…another reason I returned to using self contained units
I’m about to try this out, right after I receive my camera and install it. There is however something I need cleared up about the instructions.
According to the instructions, LOG_BITMASK bit 21 must be set. But that’s for ArduPlane. For Arducopter, shouldn’t it be bit 20, and not 21?
Video Stabilization logging is indeed enable by bit 20 according to the Copter code.
Could the instructions be updated to clarify the correct bit for ArduPlane and ArduCopter? Even the link to LOG_BITMASK in the instructions forwards to the Copter docs, which confused me for a good hour.
EDIT: I’ve created a pull request to fix this.