Hello there. I’m trying to fight vibration on my penta6 3inch multicopter.
I followed the guide to tune the notch filter. I have good results with accelerometers but not good for gyro.
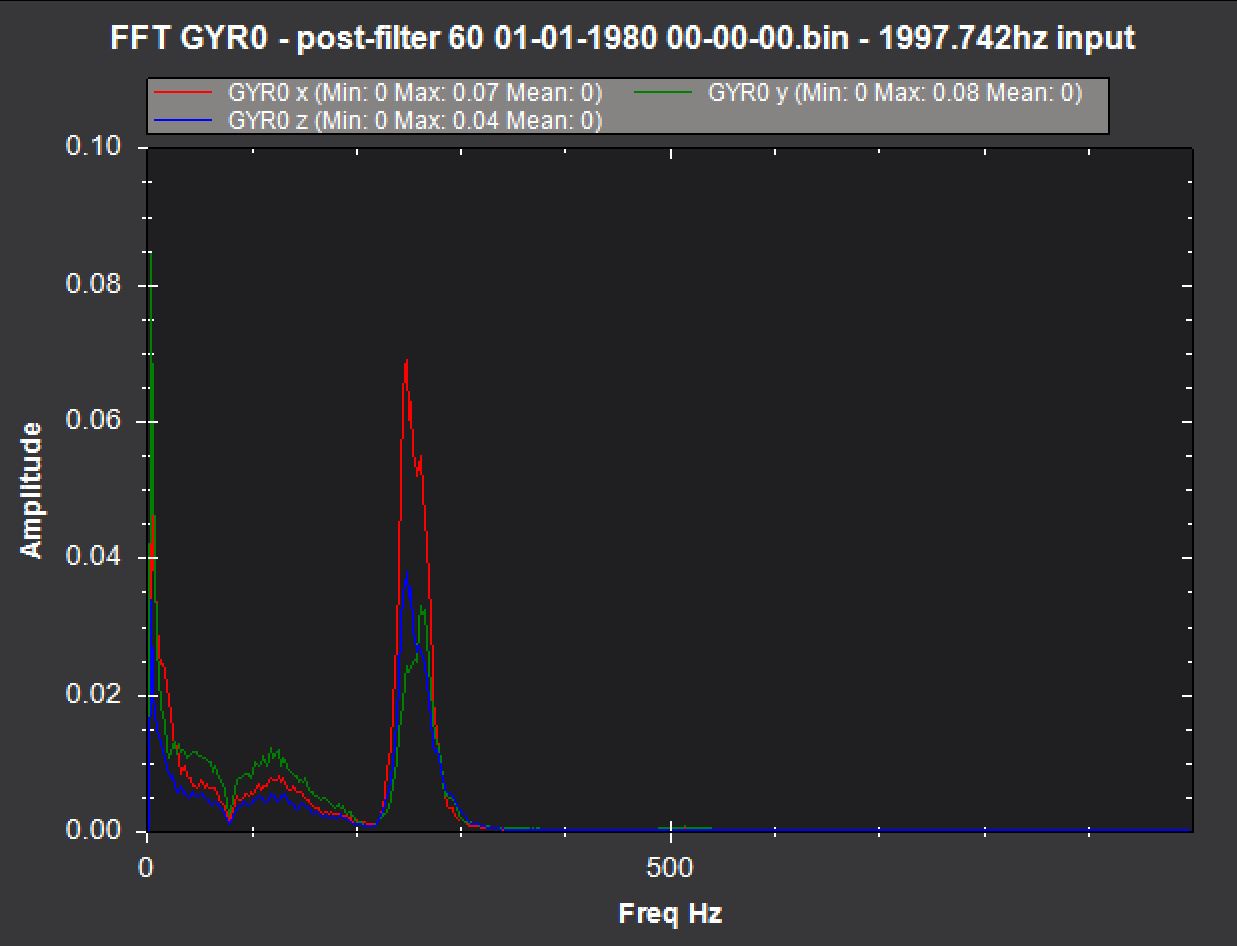
Please check this folder for files with pre and post data. After the tune, I still have peak at 260hz ish.
System has ESC telemetry enable.
The issue that I have is :
bouncing in altitude hold
drift also in stabilize
1 Like
andyp1per
August 6, 2021, 6:59pm
2
You should set INS_HNTCH_OPTIONS to 2 rather than 1 to get a notch per motor. The tune is not great - did you run autotune?
Due to high noise, unable to perform autotune currently.
Will try to set to 2 and see what happens
dkemxr
August 6, 2021, 7:59pm
4
Your pre-filter log didn’t have batch logging enabled so no way to check the notch filter parameters you used.
I’m curious about this one. Does the ATC_RAT_PIT_D = 0.0005 seem really low given the PIT_P is 0.08? the P:D ratio is really high so you may have insufficient dampening.
For reference, when I started I had the default PIDs/2, which meant my 7" had a P of 0.07 and a D of 0.002 initially.
1 Like
This is a temporary tuning in order to solve gyro noise. Once that is solved I can spend more time on tuning
dkemxr
August 7, 2021, 2:13pm
8
INS_LOG_BAT_MASK to 1. You must have done this in order to set the Notch filter frequency but it’s disabled in your pre-filter log.
1 Like
update:
after configuring INS_HNTCH_OPTIONS to 2 vibes are much lower and it fly stable. I quickly tested it also outdoor in Loiter with (initial) good results.
dkemxr
August 16, 2021, 5:31pm
10
Yes, Dynamic Harmonic has worked well for me also.
BTW I checked the log and one of the 2 has raw data for the filtering. Could you please double check?
dkemxr
August 16, 2021, 5:48pm
12
Without the Pre-filter batch log it’s hard to know how effective the result is:
You have this. OK, could be good…
ok, something wrong with Pre-filter log.
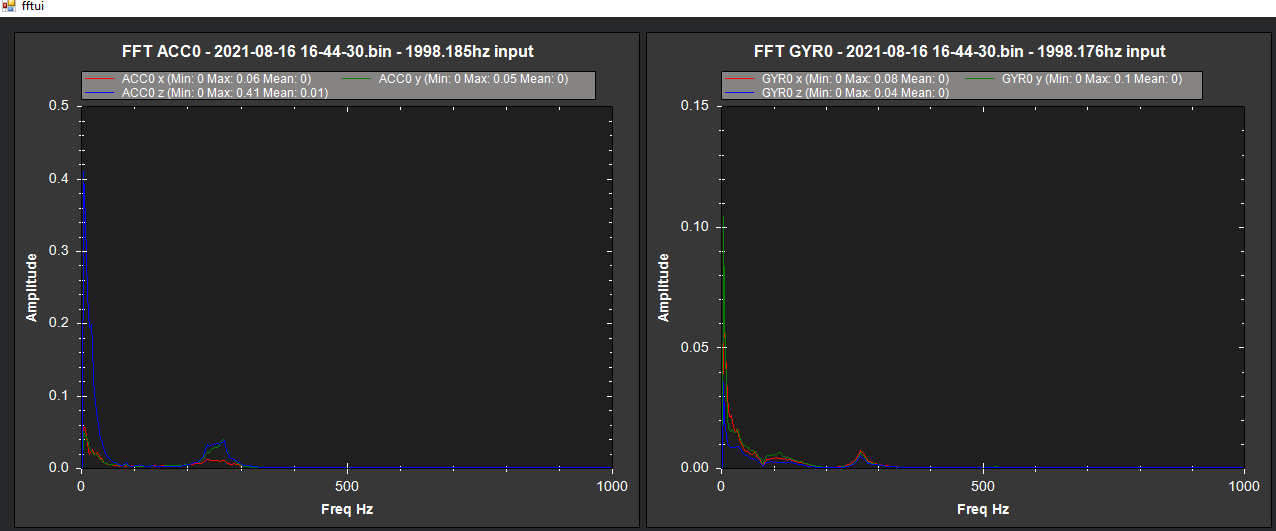
anyway this is what I got now.
dkemxr
August 16, 2021, 6:06pm
14
Even w/o comparing to a pre-filter log I’m sure that’s very good.
BTW-No need to show the Accel graph when discussing the Notch filter.
Thanks. learned something new!
I will now apply this to few other system to improve them