For sending commands, we are using the follow test commands:
!/bin/bash
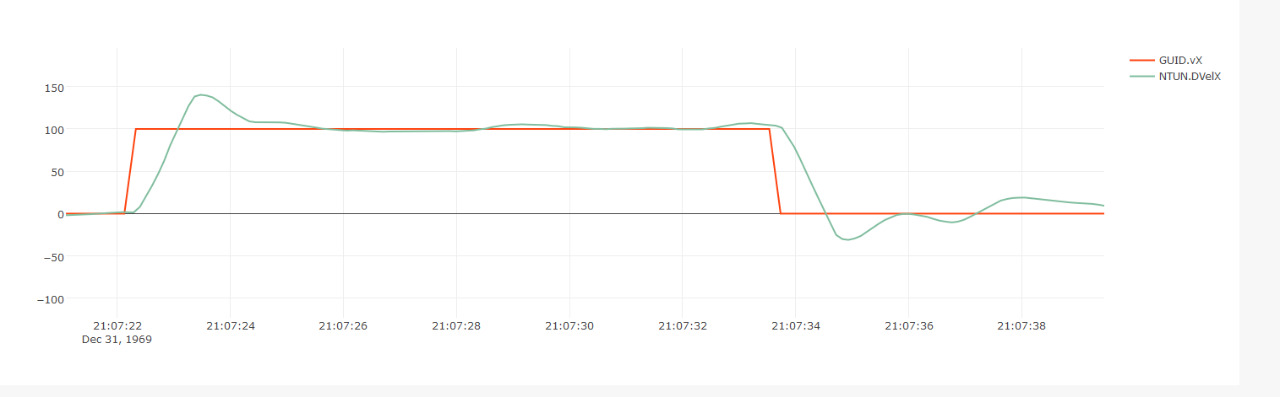
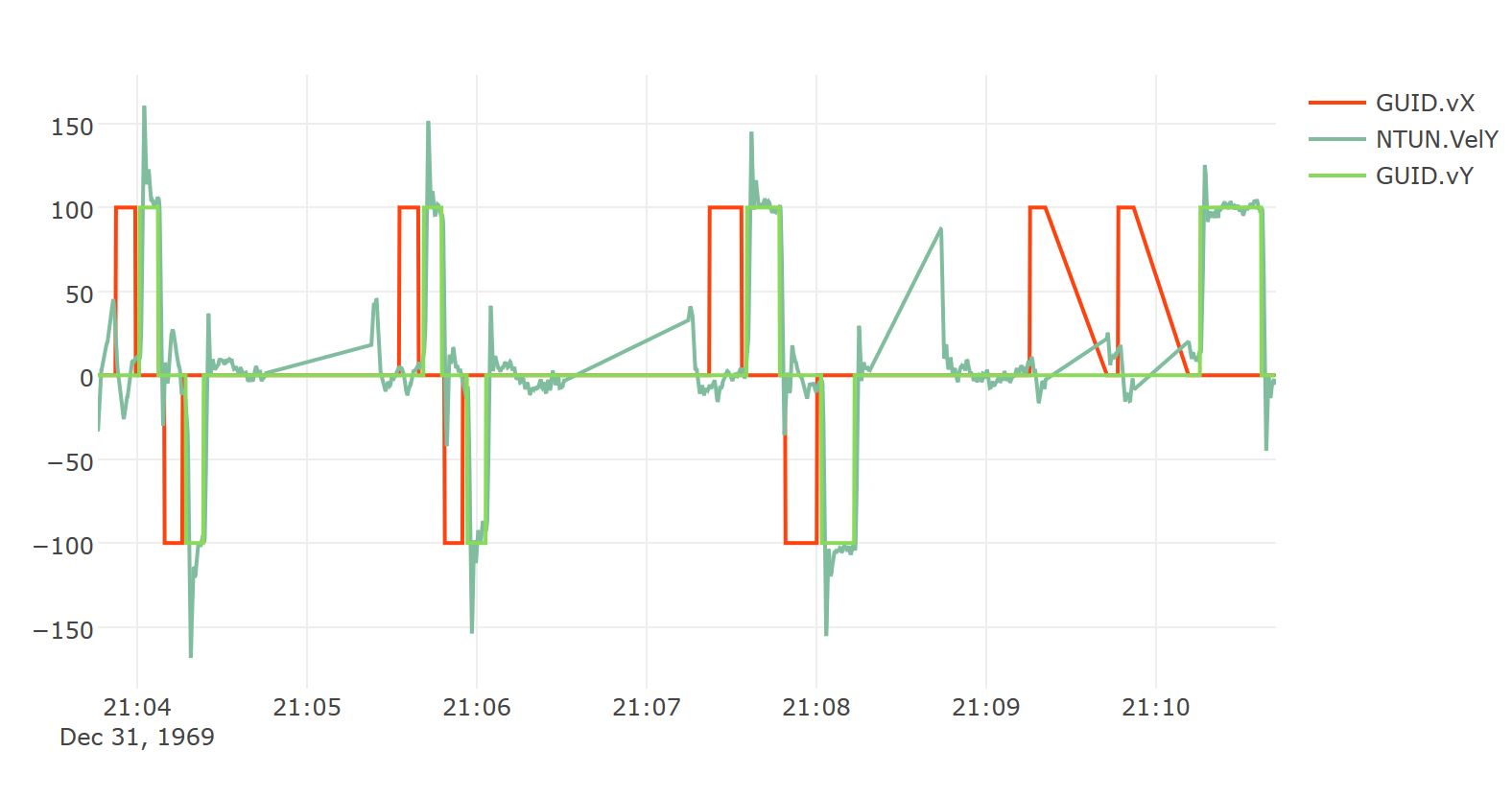
echo "Velocity 1,0,0"
rosservice call /flytos/navigation/velocity_set “{vx: 1.0, vy: 0.0, vz: 0.0, yaw_rate: 0.0, tolerance: 0.0, async: false, relative: false, yaw_rate_valid: true, body_frame: false}”
echo "Flying for 5 seconds"
sleep 5
echo "Velocity 0,0,0"
rosservice call /flytos/navigation/velocity_set “{vx: 0.0, vy: 0.0, vz: 0.0, yaw_rate: 0.0, tolerance: 0.0, async: false, relative: false, yaw_rate_valid: true, body_frame: false}”
echo "Velocity 0,1,0"
rosservice call /flytos/navigation/velocity_set “{vx: 0.0, vy: 1.0, vz: 0.0, yaw_rate: 0.0, tolerance: 0.0, async: false, relative: false, yaw_rate_valid: true, body_frame: false}”
echo "Flying for 5 seconds"
sleep 5
echo "Velocity 0,0,0"
rosservice call /flytos/navigation/velocity_set “{vx: 0.0, vy: 0.0, vz: 0.0, yaw_rate: 0.0, tolerance: 0.0, async: false, relative: false, yaw_rate_valid: true, body_frame: false}”
echo "Velocity -1,0,0"
rosservice call /flytos/navigation/velocity_set “{vx: -1.0, vy: 0.0, vz: 0.0, yaw_rate: 0.0, tolerance: 0.0, async: false, relative: false, yaw_rate_valid: true, body_frame: false}”
echo "Flying for 5 seconds"
sleep 5
echo "Velocity 0,0,0"
rosservice call /flytos/navigation/velocity_set “{vx: 0.0, vy: 0.0, vz: 0.0, yaw_rate: 0.0, tolerance: 0.0, async: false, relative: false, yaw_rate_valid: true, body_frame: false}”
echo "Velocity 0,-1,0"
rosservice call /flytos/navigation/velocity_set “{vx: 0.0, vy: -1.0, vz: 0.0, yaw_rate: 0.0, tolerance: 0.0, async: false, relative: false, yaw_rate_valid: true, body_frame: false}”
echo "Flying for 5 seconds"
sleep 5
echo "Velocity 0,0,0"
rosservice call /flytos/navigation/velocity_set “{vx: 0.0, vy: 0.0, vz: 0.0, yaw_rate: 0.0, tolerance: 0.0, async: false, relative: false, yaw_rate_valid: true, body_frame: false}”