Hello everyone, I am trying to fly a drone without GPS and to achieve maintain the horizontal position I am helping with a PX4FLOW. Do you know if it is possible to fly in GUIDED_NOGPS mode and when you stop sending instructions the drone acts as in LOITER mode using the PX4FLOW?
Assuming you are using a companion computer, you can fly it in Guided mode to achieve what you want. px4flow will act as GPS in that case. You can use the GUIDED_noGPS commands (set_target_attitude) in guided mode as well as sending velocity and position commands using set_position_target_local_ned. If you wish to return manual control, make sure you set the mode to loiter at the end of your code.
If you just want to replace the gps by the optical flow to stabilize your RC actions as in Loiter mode with GPS, you can simply use the Loiter mode with the px4flow which should act as a GPS in that case.
For more info on how to set it up read up here http://ardupilot.org/copter/docs/common-px4flow-overview.html
If you’ve already read it and set it up, pay special attention to this section http://ardupilot.org/copter/docs/common-px4flow-overview.html#second-flight-copter-only
Hi @Luiz_Felippe_Ozorio , i could only did Calibrating the sensor and obtained this graph:
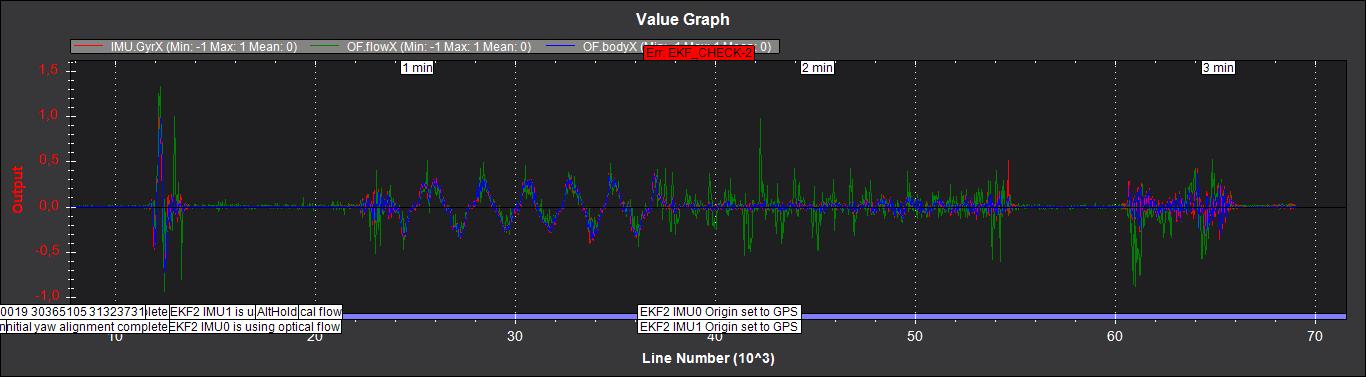
Is it normal? i see much noise when the roll movement is off in the reading of the flow sensor.
I had obteined similar result with pitch movement.