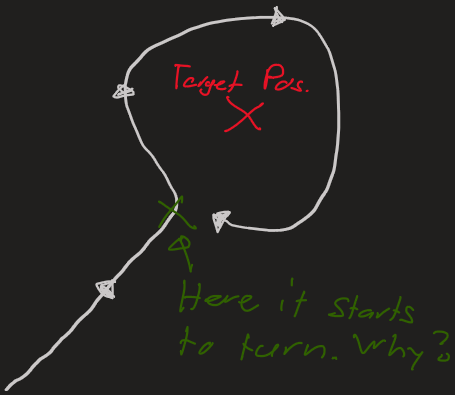
I am setting Waypoints with a companion computer in guided mode. I expected my plane crosses the waypoint, but it starts turning before and circle around that point. Can I change this behavior, so that it crosses the waypoint?
Br Fabian
I am setting Waypoints with a companion computer in guided mode. I expected my plane crosses the waypoint, but it starts turning before and circle around that point. Can I change this behavior, so that it crosses the waypoint?
Br Fabian
Hi Fabian, welcome to ardupilot discuss.
No, guided mode is precisely flying to a destination and loitering once you have reached it. It would be problematic in many ways if the aircraft just kept flying. From a navigational point of view, you can only change the loiter radius and direction (clockwise or anti-clockwise).
If you want to spontaneously navigate routes with guided without loitering, you must give a new guided command just before circling.If you know how you want to fly before you start, better create a mission.
Rolf
Hi Rolf
Thank you for your answer.
I get it that the plane has to loiter, that is good behavior.
Maybe my explanation wasn’t that clear:
I send a position (x;y) to the flight computer and it never reaches this point.
It starts loitering before it reaches position (x;y).
This is how guided mode behaves. You can only change the radius or direction. Could you sketch the behaviour you would like to have? (Keeping in mind that the plane must start a loiter around the point)
You could have the plane fly in a different mode (FBWB, CRUISE, etc) and then when it crosses your target position you switch to LOITER mode. The moment the plane switches to LOITER it creates and point and it will fly out the radius of the circle and then start it’s turn to loiter around the point.
The desired behaviour could of course also be achieved with a LUA script.
Rolf
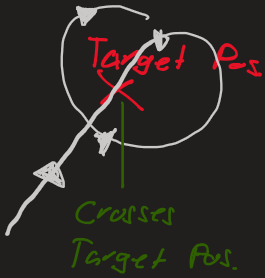
I want that it crosses like in this drawing
I think the Autopilot has to be in guided mode for accepting commands or not?
Or maybe I don’t get your point right.
Yes, that is right.
I can also set the target position behind the real desired position and check the position to send an update.
Loiter is just a normal flight mode, you can enter it from any mode. The plane will just turn around in circles around the point it was turned into loiter mode as defined by WP_LOITER_RAD. This will give you the path you’re looking for.