Hi
I noticed a few times that when in Guided mode and the vehicle arrived to the requested WP it will change mode to Loiter, couldn’t find any param to disable this, am i missing any?
I saw the GUID_TIMEOUT but looks like it is not for WPs.
Hi
I noticed a few times that when in Guided mode and the vehicle arrived to the requested WP it will change mode to Loiter, couldn’t find any param to disable this, am i missing any?
I saw the GUID_TIMEOUT but looks like it is not for WPs.
Never ever saw that happening in our systems and they only use guided.
Please explain exactly what you are doing
Would need to see a .bin log to know more.
Hi
You can see the log at: 2023-12-28 15-55-21.bin
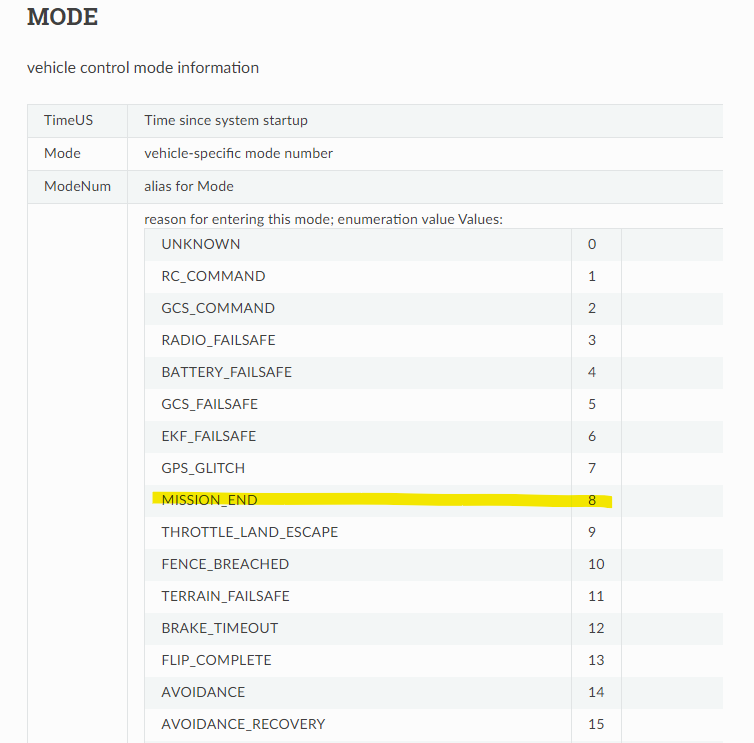
but the only log for mode change to loiter shows the reasons is 8:
the mode before was guided.
The Mode was 4 (Guided) and changed to 5 (Loiter) for about 1/2 a second then changed to 4 (Auto)
That is not behaviour dictated by the Guided timeout value, and I believe a failsafe would not cause that.
Without an RC transmitter/receiver it’s only possible that a mavlink command has requested the change.
You might have to check the tlog - and maybe watch your GCS operation a bit closer.
I tried a few things in SITL for some time and there was no way the copter ever changed to Loiter except if I selected Loiter. It didnt go to Loiter on the way from Guided to Auto, nor after any timeout.
Guided would only ever change to another mode for a failsafe.
Thanks for looking in to it…
all the other mode changes show Rsn 2 = GCS_COMMAND and they correlate with my GCS logs… only the loiter show Rsn = 8 and it is not sent from my GCS, not even sure what mission_end means in guided. it looks at the time that it changed when the drone arrived at the WP.
I checked 4.3, 4.4, and 4.5-dev. No set_mode call in the copter code sets loiter with reason mission_end.
In your log, the firmware is identified as ArduCopter V4.3.7 - ASCENT AEROSYSTEMS 4.0.6 - RID, which is not standard code. Could it be possible that some changes in this version are causing this mode change?
I’ll check with Ascent ![]() … thanks for the heads up.
… thanks for the heads up.