Hi, i need some guidance on how to tune notch filter correctly. the quad is a 3inch custom frame
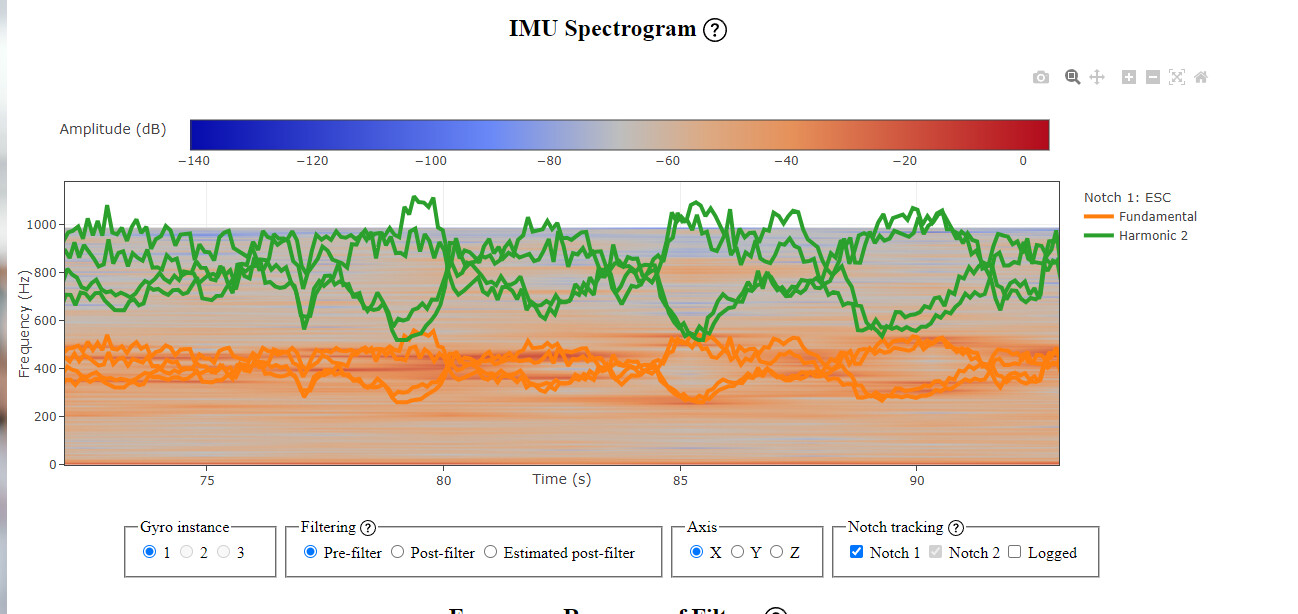
attached bellow is my logs, i used a previous notch filter from another 3 inch drone that fly great, but have no luck on this new drone.
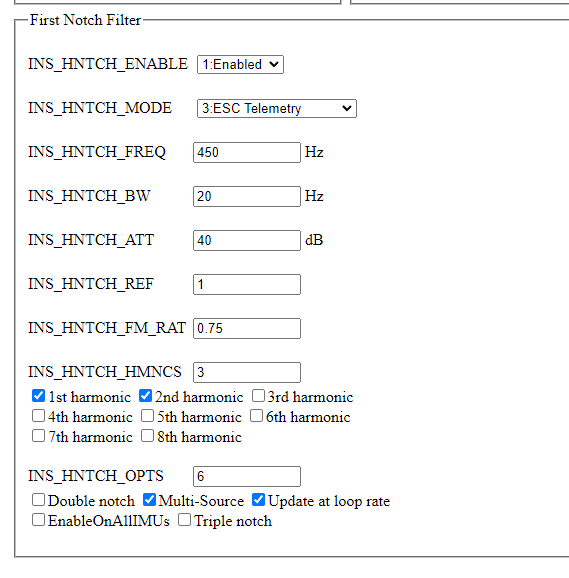
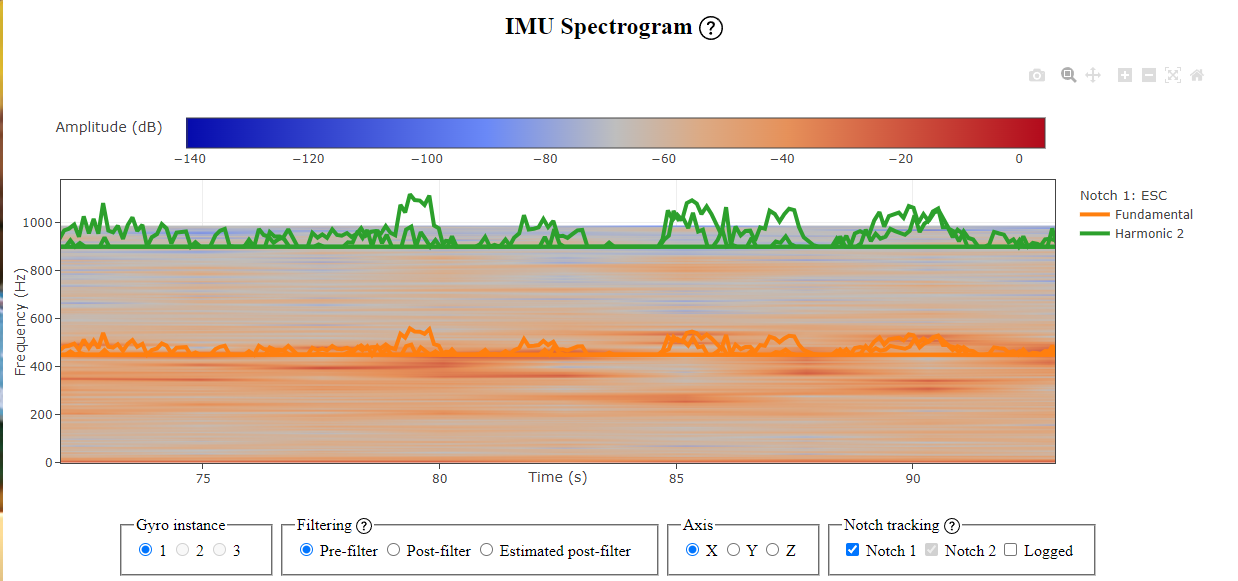
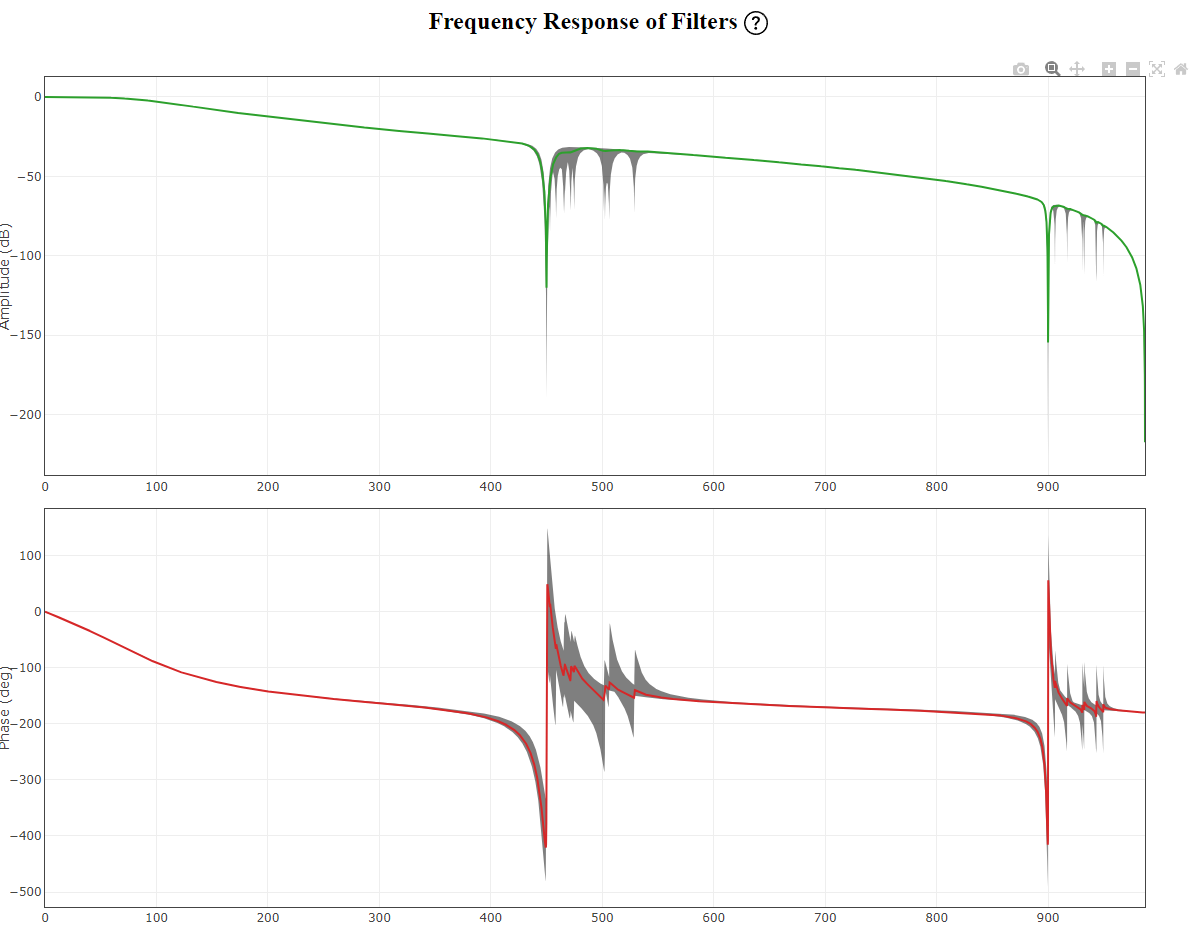
as seen above the graph is quite wack. is the goal of filltering is to smooth the IMU Spectrogram graph in such a way that the harmonics are close to each other? noting i have not yet autotuned the drone as i experience the drone yawing by it self with out any inputs. if the goal is to smooth the graph will this setting works or is there a maximum INS_HNTCH_FREQ value?
It was the only firmware i have at the time of flashing, but i am in the process of updating to the latest firmware, as for dshot. Dshot have been enabled
Sorry i totally missed the fact that bdshot is different from dshot, but regardless i have ESC Telemetry via telemetry port. I will update to the latest stable and send the updated logs.
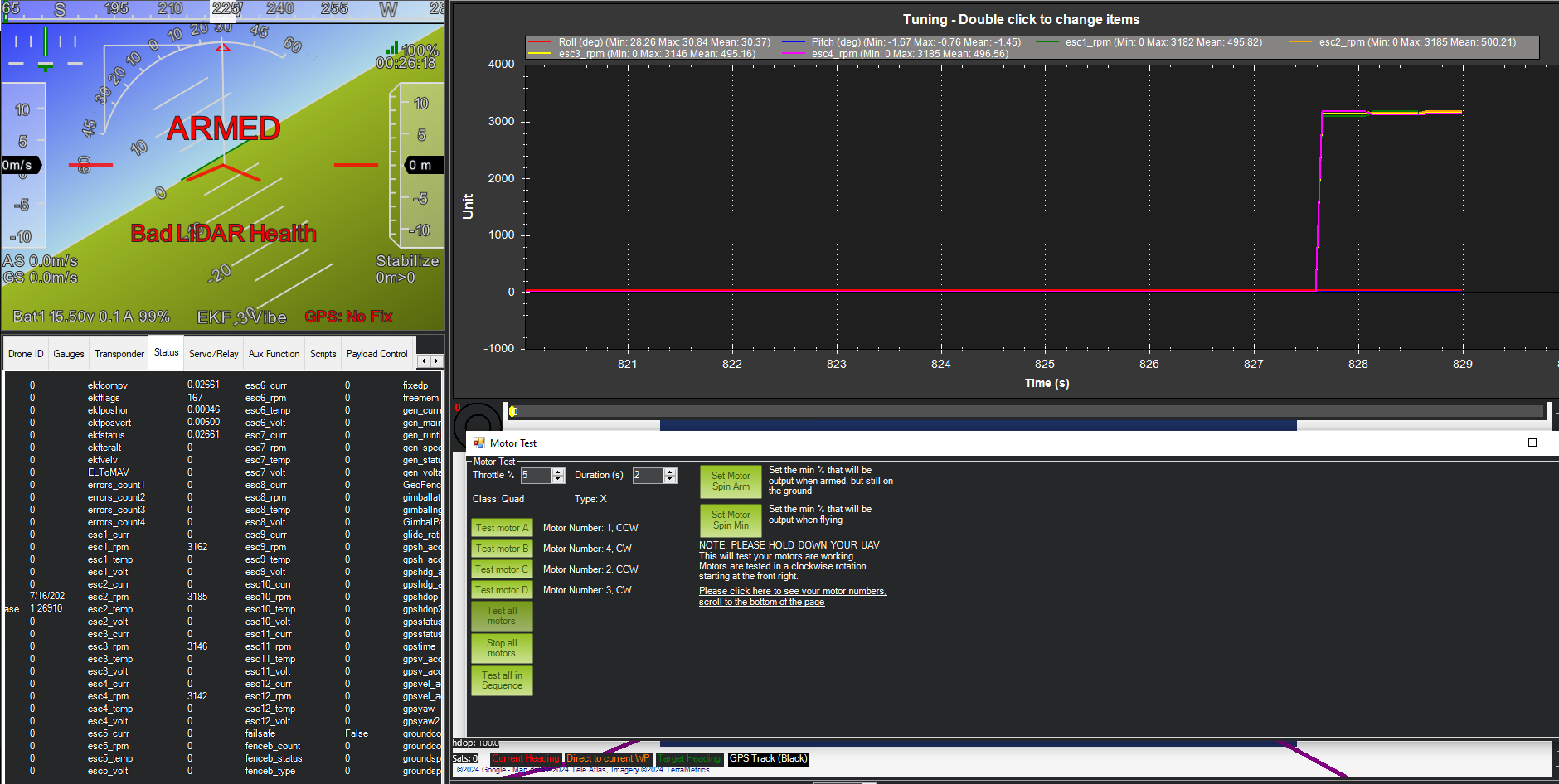
Fine but not what you want to use for the Notch Filter reference. ESC RPM via Bdshot is at a much higher data rate. If you set the serial telemetry rate to 0 and ESC RPM is in the log then you have configured it properly.
Thanks for your help! Regarding the filtering should i keep the same values or should i adjust it some way? Additionally the aircraft is doing uncomanded yaw needed constant yaw correction. Flying in stabilize mode can this be attributed to the compass calibration? Or PID?
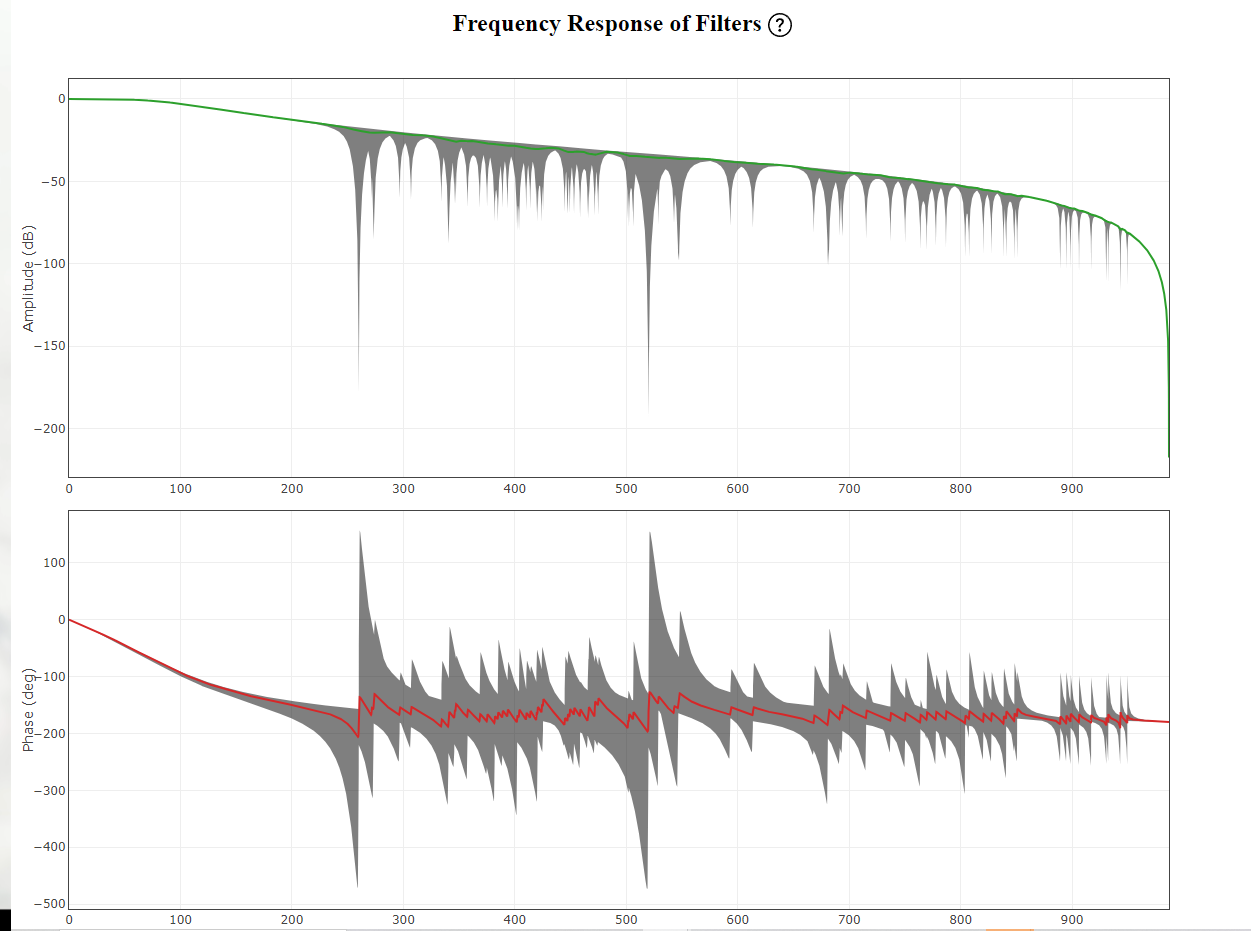
Filter looks OK to me. Even if you disable it the modes are so much higher than the Gyro cutoff there isn’t much to act on. Try it in the Filter Review Tool.
Did you run Magfit? If not do that before troubleshooting further. Do you have a Li-Ion battery? From that last log it’s hard to tell what’s going on. It looks like the craft is spinning around.