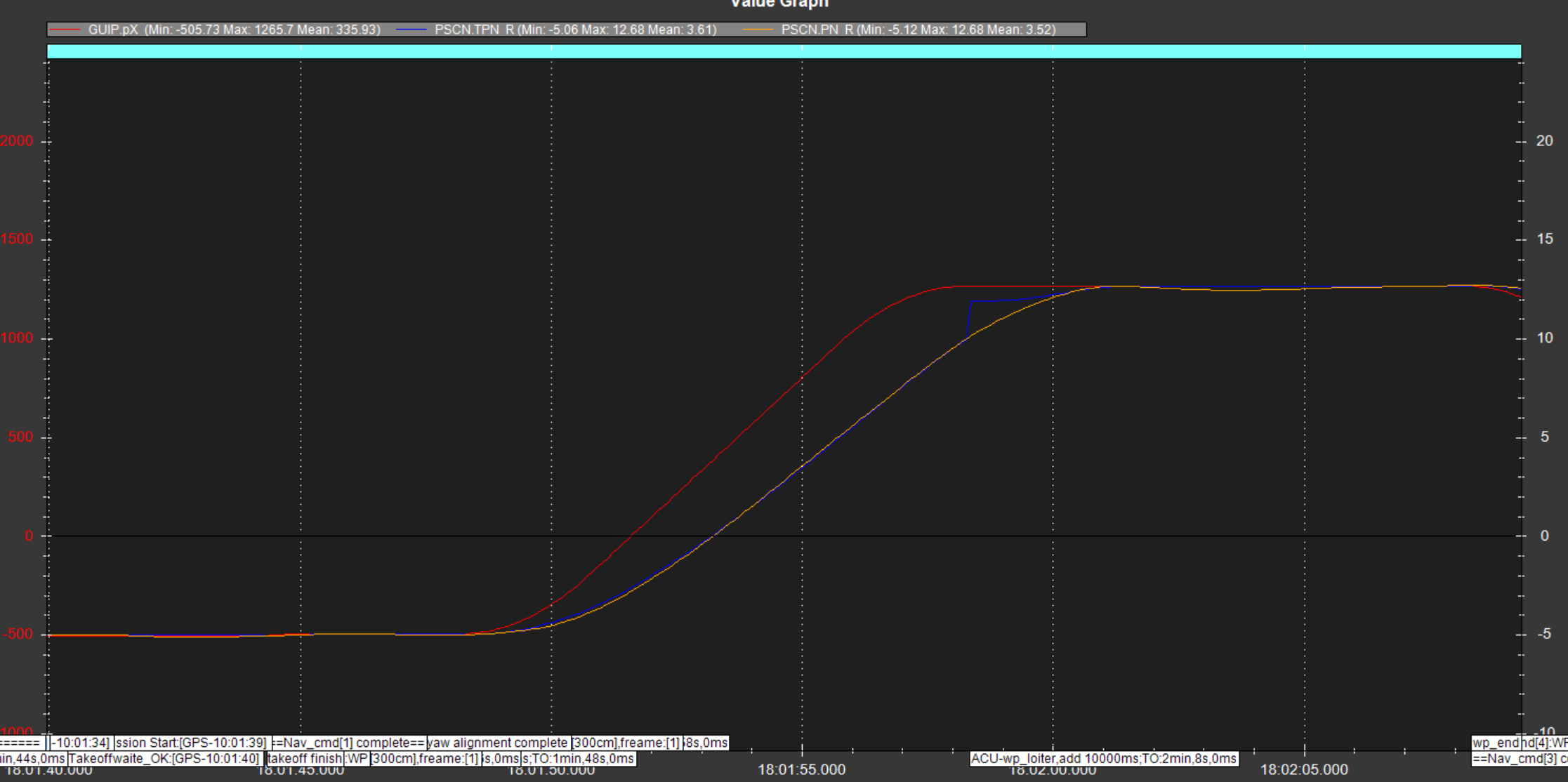
I tried to use the guid mode in the waypoint in auto mode to give the position. The frequency is 10hz. The drone seemed to have no problem during flight, but by looking at the log, the actual target position of the aircraft (PSCN.TPN) was higher than the guid. The arrived position (GUIP.px) is delayed by nearly 3 seconds, which is a huge delay. Does anyone know what is causing it or can give some tips?
Thank you so much!