I flew a mission yesterday with a helicopter. It was a long range flight of 21 miles, most of it flown at 28 m/s ground speed. The helicopter followed the ground track perfectly on the whole flight. On final for high speed flights I usually prepare an approach like this - explanation below
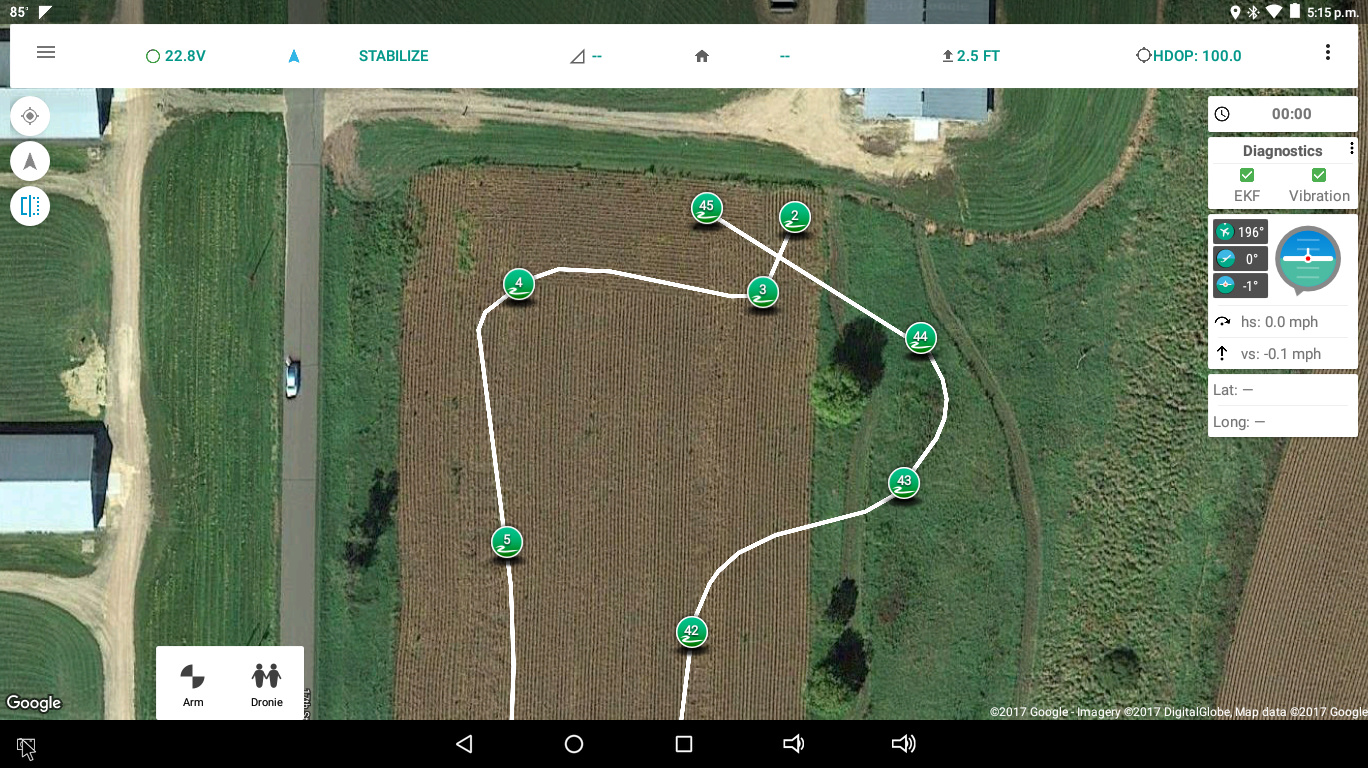
So the helicopter is coming in hot at waypoint 42, about 20-21 m/s. I make a descending “S-turn” at the end of the flight so the helicopter banks into the corners at about 45 degrees and bleeds off speed while descending to come to a nice smooth stop at waypoint 45.
What actually happened on this one was this:
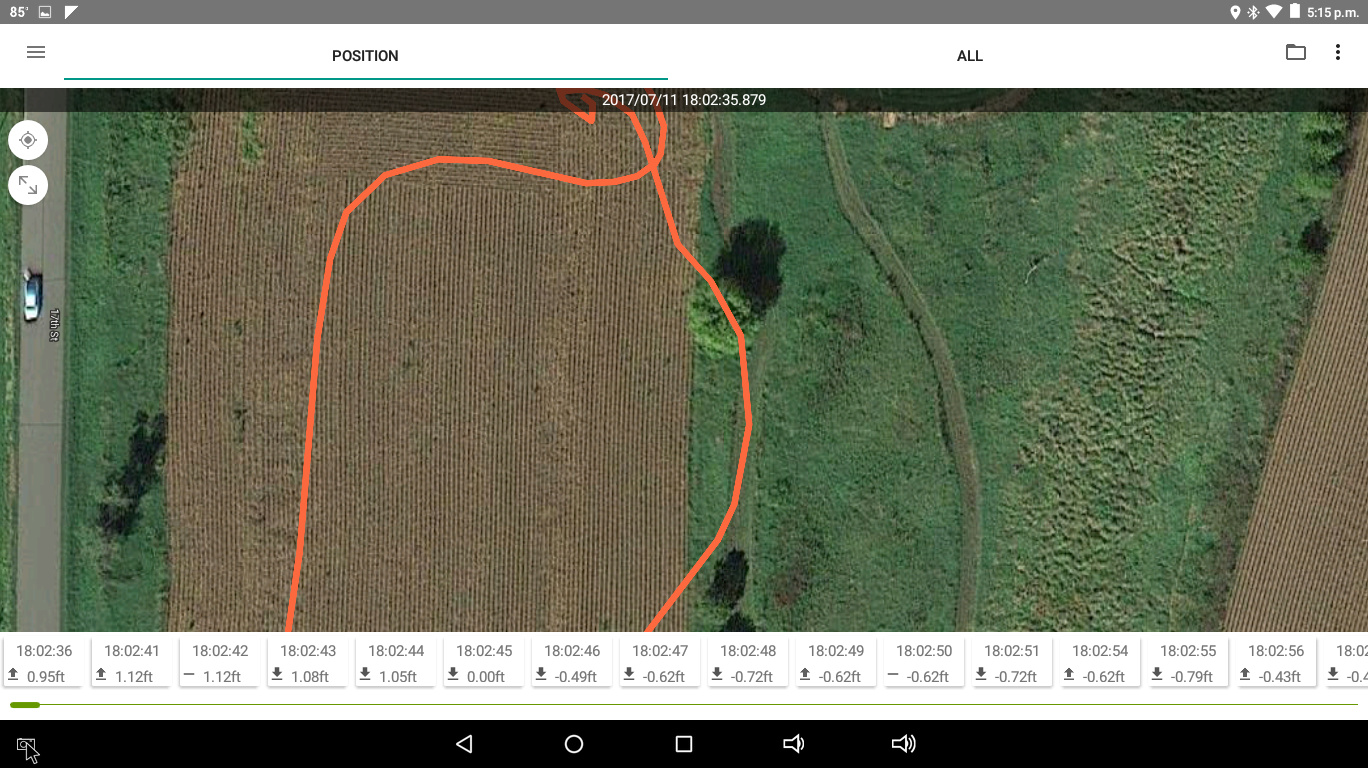
I wish Tower would be able to display the flight plan and actual ground track on the same screen in the Vehicle History, and be able to play back telemetry logs.
Anyway, notice that ~35 foot tall scrub shrub alongside the field there. It USED to be ~35 feet tall. It’s now about 33 feet tall because the helicopter flew right thru the top of it and sawed it off. It didn’t damage the helicopter at all. It was just really exciting. Since I wasn’t expecting the helicopter to fly thru the tree my reaction time was less than ideal. From where I was it looked like the heli was looping around the back side of the tree like it’s supposed to. The next thing I know the top of the tree suddenly turns into flying leaves and branches and the helicopter comes out of the tree a little sideways because the landing gear dragged a bit in the branches that didn’t cut off. I threw it into Acro at that point and shut it down and autorotated it in case it had damage.
The BIN log from the Pixhawk is gone. Somehow the microSD card popped out of the flight controller going thru the tree and was lost. All I got is the tlog. But the EKF was fine, 14 satellites, HDOP .86. compass perfect. It just decided to sort of “average” the waypoints instead of actually flying them. And I’ve done this same type of approach from high speed flights to transition to hover hundreds of times. The WPNAV_RADIUS is set to 2 meters. And it missed the waypoints by at least 15 meters starting at waypoint 41 when it started its descent from its cruising altitude to the final approach.
Anybody ever seen this, or any idea what caused it? Especially considering I’ve done this 100’s of times, including on this very flight flown last year twice with the same helicopter. And it worked perfect. Until this one. For whatever reason, it decided to try to keep the speed up by cutting off the corners instead of flying the corners and using the WPNAV_ACCEL values to slow the aircraft to transition to hover.