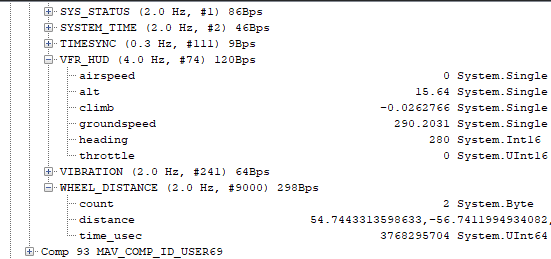
It appears my rover was doing 290m/s and climbing.
I didn’t have logging enabled, so I don’t have much more information at this stage. The speed appeared to increase linearly.
Hello, I have the same problem using my motor encoders for non-GPS navigation. Rover on the map just moving with huge speed when in reality it is stoped. Have you solved this problem?
Yes, the issue appeared to be with the encoder resolution being too high. From memory I had 2000 point encoders per rpm which was when increased when I ran it through the gear box. In effect I would have 20000 points per rpm.
The solution was to install lower-resolution encoders into the motors, I went for 100 point which then gave me 1000 points per rpm.
Additionally, you cannot just swap the encoder disk, in most cases you will need to swap the encoder disk and the sensor.
Most encoder disks will have the PPR or CPR written on the disk itself, if there is no information on the motor data sheet.
This project was mothballed however we are resurrecting it late next month and so I can update you on the configurations used.