I am looking for assistance in relation to a couple of issues I’m
having with my fixed wing Grand Tundra plane (Pixhawk 6C, SDP33
airspeed sensor, Holybro M8N GPS/compass, Arduplane 4.3.3, MP 1.3.79).
Following a successful first autotuning flight the attached log is
from a second flight in which I wanted to test three things:
- A take-off in FBWA mode - this was unsuccessful due to severe left
and right and very tight ground loops. This despite entering some
taildragger parameters suggested in response to an earlier help
request ie. TKOFF_ROTATE_SPD=8, TKOFF_TDRAG_SPD1=4, TKOFF_THR-MAX=75,
TKOFF_THR_SLEW=25, GROUND_STEER_ALT=2).
I took off OK in manual mode and switched to FBWA successfully once
airborn. The plane seemed to be reasonably well tuned when flying in
FBWA mode.
-
I tried RTL and it loitered in a pretty perfect circle centred on
the launch (arming) point on the runway. -
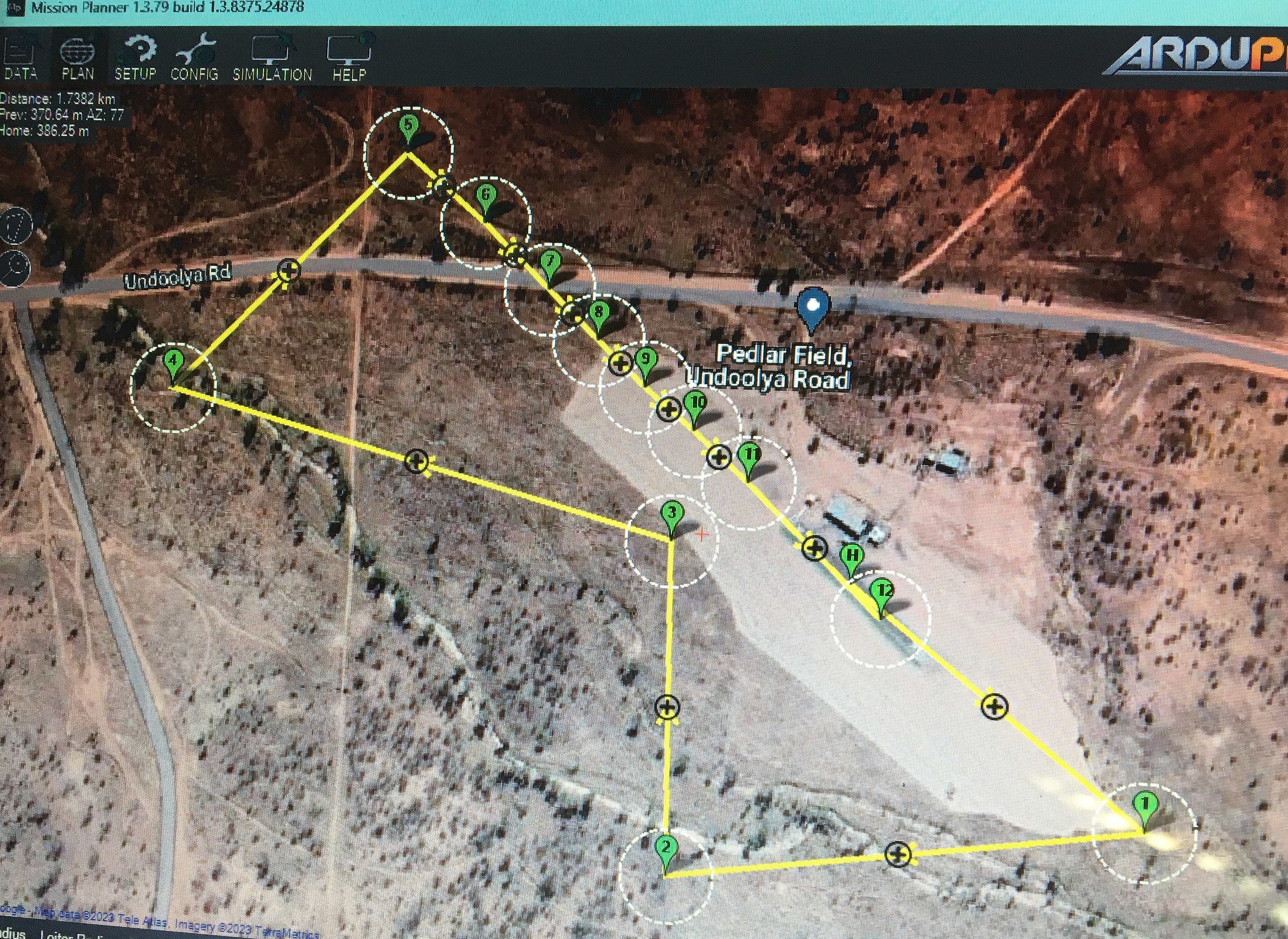
I then switched back to manual and flew it to the end of the runway
at a reasonable altitude and switched to AUTO mode (mission waypoints
and map attached). The plane appeared to broadly follow the mission
having joined it between WPs 2 and 3. However on the approach to land
sequence it was about 10m or so to the left of the descent approach
waypoints’ centres - as it looked set to hit a windsock pole I aborted
the landing and took over manually and recovered and landed.
I would greatly value any insights from the log and parameters about
a) how to get plane to take off in a straight line in FBWA and AUTO
modes and b) also any advice about how to get the plane to track the
waypoint centers so as to line up with the runway correctly.
Many thanks in advance!
links: