I’m running into some issues integrating a Gremsy Pixy F with plane 4.0.5. I can get it working just fine on copter 4.0.3 both running chibi os on a blue cube standard carrier board.
Below is the setup in copter.
telem2 set at 115200
telem2 protocol set to 2 for mavlink 2 (it works with copter as mavlink 1 & 2)
This gives me the ability to see the mavlink packets in mavlink inspector
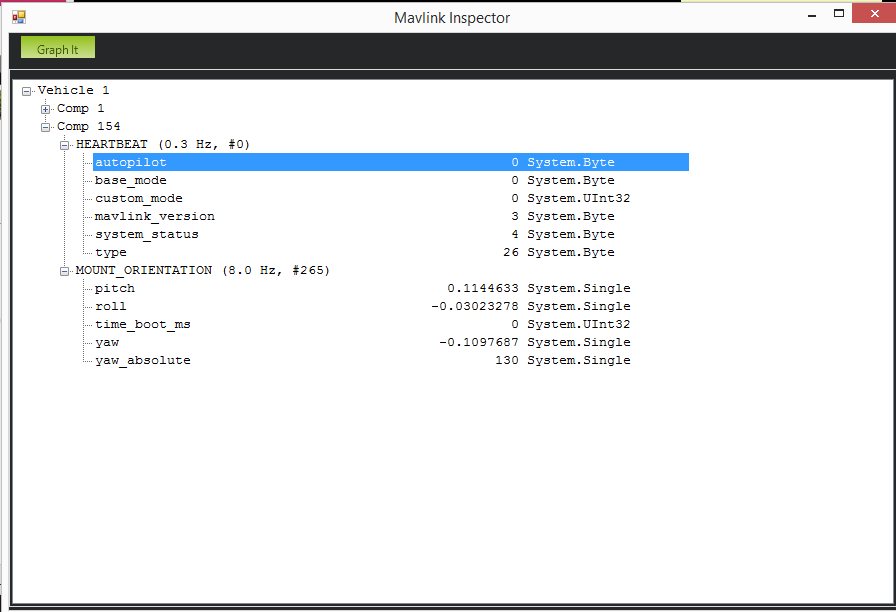
Then if I set mnt_type to 4 for mavlink gimbal control I’m able to control the gimbal.
With the same setup on plane firmware I’m not able to see any of the mavlink packets in inspector.
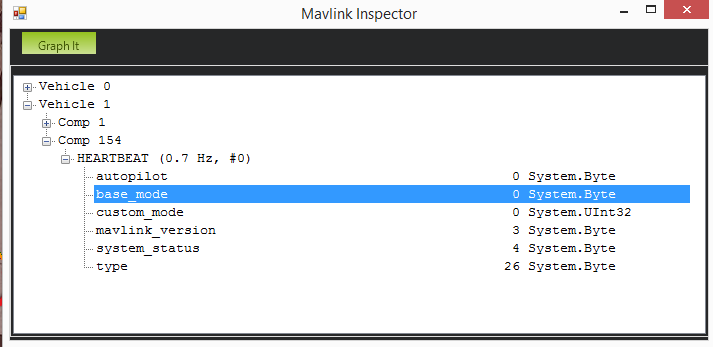
I set up an arduino to mimic the gremsy’s heartbeat packet and connected it to plane firmware and I’m able to see the heartbeat. So it isn’t a mavlink routing issue as far as I can tell.
This was done with mavlink_msg_heartbeat_pack(1,154, &msg, 26, 0, 0, 0, 4);
I then can see this packet being sent from the arduino in inspector as well.
Kinda stumped I should at least be able to see the mavlink node.