But when i try to arm in stabile and then switch to loiter, it is fine. Really appreciate any suggestion on the issue. I have also uploaded the parameter of my copter:
@Rcmaniac Can you post a tlog or dataflash file? (At least the rest of the screen, it will send you another text message that says what part is failing)
Its weird cause why is it looking for gps 2 if gp2 and gps3 are dissabled. Maybe thats the problem, should i re check those boxs to renable them, i doubt thats the issue though.
Do you have the params? Off the top of my head if GPS_TYPE2 is not 0 then we will require a second GPS to be configured before allowing it to boot. If you have that set to 0, then if you can send me your full param set (or a log file) I will try and replicate it here.
GPS 2 is enabled, set GPS_TYPE2 to 0 to mark that we aren’t trying to find a second GPS instance. If the instance is supposed to be present we require it before allowing arming.
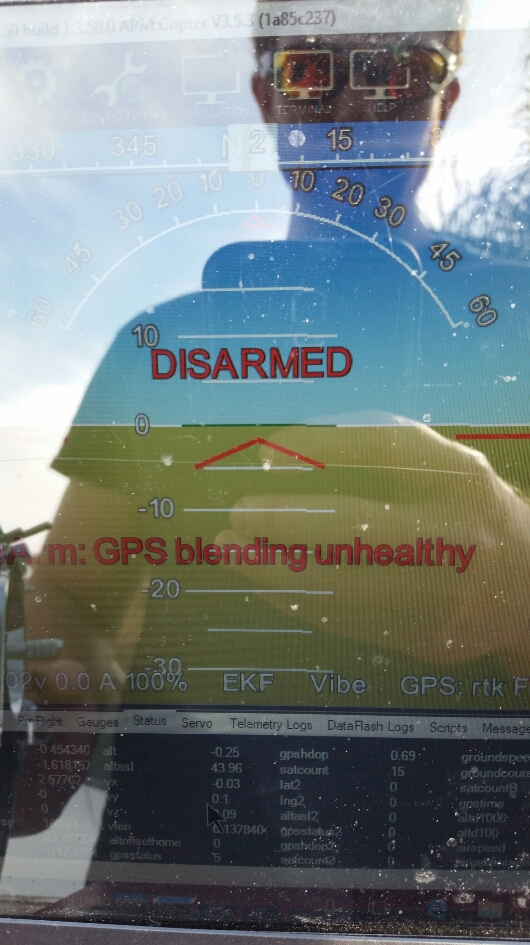
If you don’t have a second GPS then you can’t do GPS blending. Setting GPS_TYPE2 to 0 disabled the second GPS instance. I’m assuming you don’t actually have a second GPS on the system?
Anyways to disable blending and let you through the arming checks GPS_AUTO_SWITCH to 0 (disables any switching) or 1 (switch to the better GPS instance if you plugged a second GPS in) would work.