Hello guys! Yesterday we needed to force land because both GPS went to zero a few times and the position went a bit crazy. It looked like a GNSS jamming, but that would be super rare in Brazil.
Some considerations:
Setup is cube orange + Here 3 (x2), same drone we’ve been using for the past 2 years. We never had this problem (besides the confirmed GPS jamming in Israel)
At the moment, we were using NTRIP
Along with the GPS issue, we had bad internet connection. We were watching the flight from our headquarters and the connectivity module was online all the way and the eth indicator for the companion was blinking red sometimes. So, it looked like a misconnection between the companion and the connectivity module.
The operation team reported, days before, that the voltage drop during the takeoff was more intense than usual, but not in that flight.
The connectivity issue, however, wouldn’t explain the GPS issue. Following, the next hypothesis would be some kind of electrical failure, but we had gps misconnection a while ago and the behavior was different (like “GPS2 was specified as UAVCAN” ).
There is a large base of antennas close to the mission fly path
Number of satellites were low, I expect to have more than 24 if you are using Here 3. What RF frequency of the module you are using? Does it block the L1/L2 band?
In case you are using NTRIP RTK, just to make sure that we have the good reference source. Bad internet connection may affect the quality of GPS correction if you do not have the direct-RF from RTK base to the drone
Yes, this could mean more interference and could help with the GPS issue we observed.
We are actually used to 12-15 satellites, and we fly in that range of numsats. Our GPS_GNSS_MODE param is set to 0, so we use the default GPS params on the Here3 (not GLONASS, not Galileo, etc.). It says on their manual that it uses “GPS L1C/A” as default.
I agree that bad connection affects the quality of the GPS corrections but it should not bring all satellites to 0, right? (That’s the behaviour we saw in telemetry).
Correct me if I’m wrong, but the worst it could happen if we lost internet connectivity (or the RTK base somehow was unavailable, for that matter), we would only start ‘losing correction’ little by little, until we reached a 3DFix state with no RTK correction. We wouldn’t see this weird behaviour of losing all satellites in one GPS, then losing all sats on GPS2, etc…
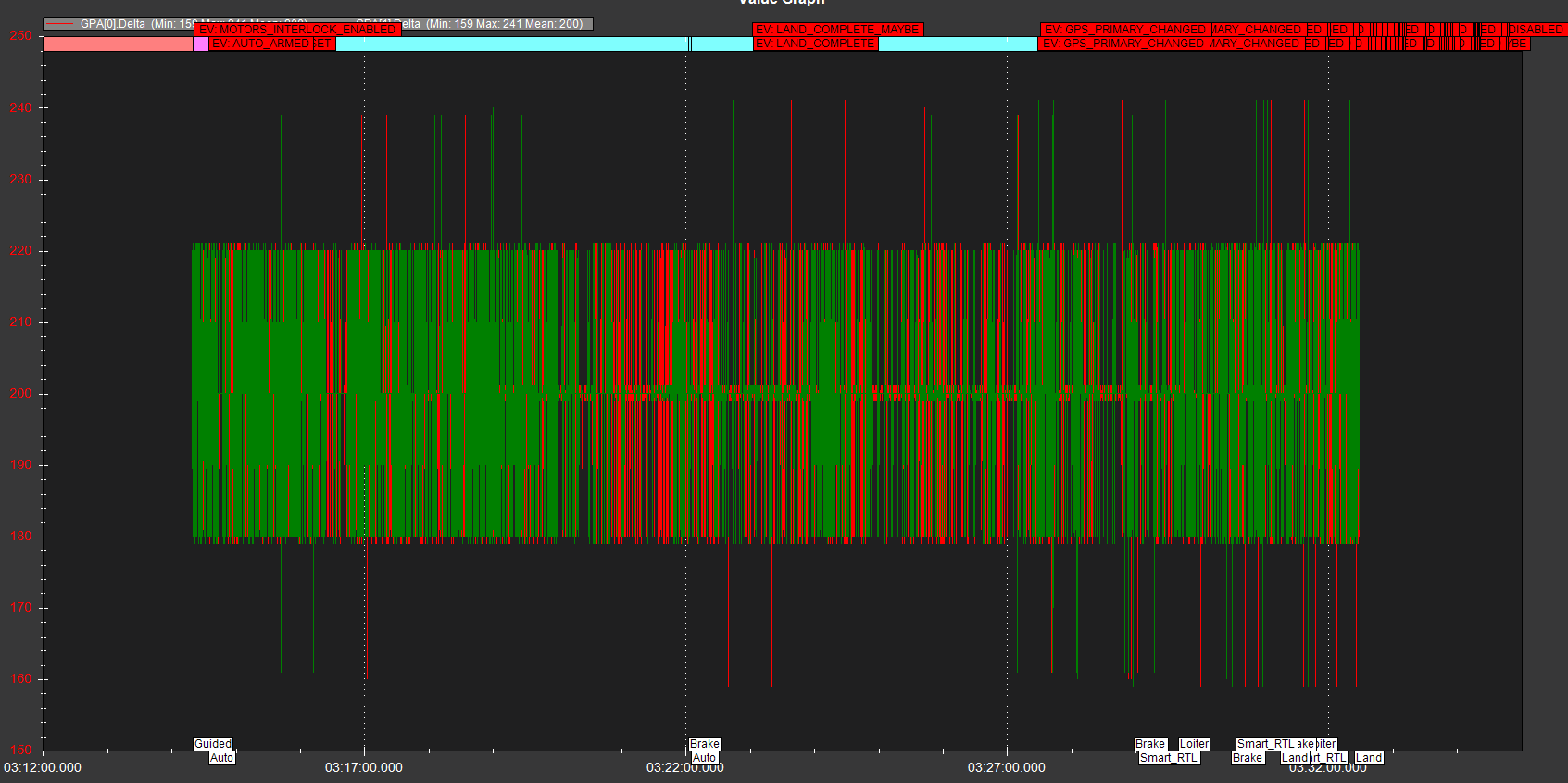
See the GPA Delta values are all over the place…
This is a sure sign that the GNSS units are trying to use too many constellations and it is slowing down the update rate. By default those Here3 units will definitely try to use everything they can “see”.
The cure is to set
GPS_GNSS_MODE,65
GPS_GNSS_MODE2,65
See if that also fixes the spikes in HDOP