Greg,
I am unsure why you couldn’t get the NEO-6M is not working with Ardurover. It should I think. You should be able to set the GPS type to AUTO or UBLOX and it should work.
But on the C099-F9P:
As a first step with the C099-F9P, we just want it to talk to Ardupilot. Ardupilot will set the configuration for you in the F9P if you have the RX and TX connected. But here is a catch: you must use UART1 of the C099-F9P. UART2 is not as full-featured as UART1. UART2 cannot send the UBX binary protocol which is the protocol Ardupilot will attempt to configure in the F9P.
On the C099-F9P board, you need to set the jumper to 40E like this:
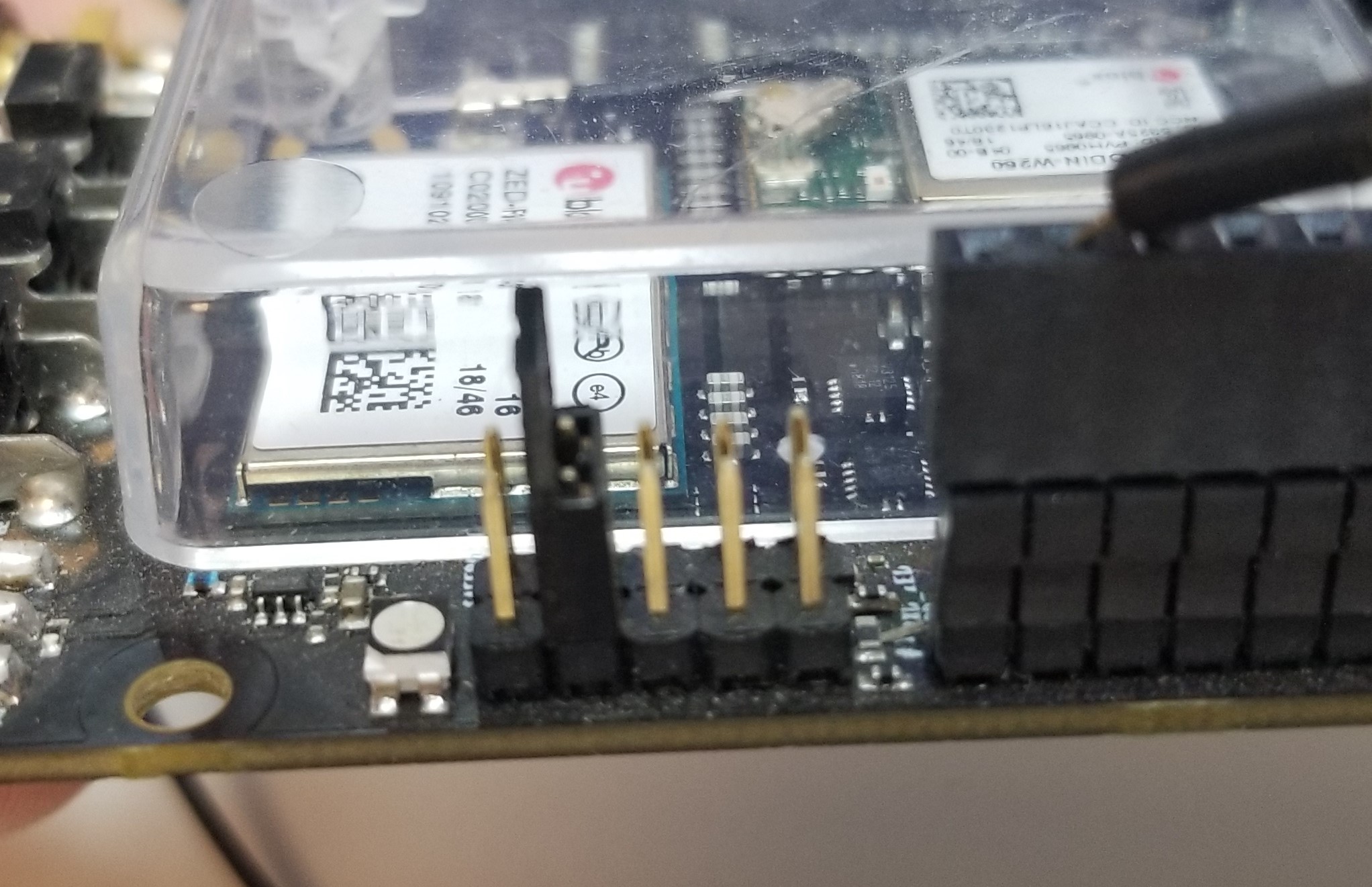
That will disconnect the UART1 RX pin from the ODIN Wifi/BT module and connect it to the Arduino header pin labeled “ZED RX”.
Now, you should be able to connect the ZED RX to the GPS TX on the pixhawk and the ZED TX to the GPS RX on the Pixhawk. If you have the GPS type set to AUTO or UBlox, Ardupilot should discover the C099-F9P and configure it. The only thing I am unsure of is if Ardupilot will always be able to match the baud rate of the F9P. I went ahead and set my baud rate using ucenter to 115200 but I would just give it a try without doing anything in ucenter first.
I need to add that it has been a few months since I had my C099-F9P connected to my Pixhawk. I have an Ardusimple RTK2B now but I am still using a C099-F9P for my RKT base. I’m saying this so you will know that I might not remember something right! I can connect my 2nd C099-F9P to be sure it does work as I say at some point if need be.
Looking forward to hearing from you.
Kenny