I expect this question should also go in the ArduPilot Topics also?
Hello, I’m a newbie, I wonder if you generous and clever people can help me (I’m not just flattering you – I genuinely think this Free software project is fantastic) . I’m experiencing problems connecting a GPS to ArduPilot Mission Planner , which I would like to use for a Rover using RTK.
The first problem is that I couldn’t connect a GPS to ArduRover (V4.0.0).
I gave up trying to connect a Ublox C099-F9P Application board (the eventual target GPS – intended to provide RTK) and reverted to a simple Ublox Neo-6M, but this would not connect to ArduRover on the Flight Controller either.
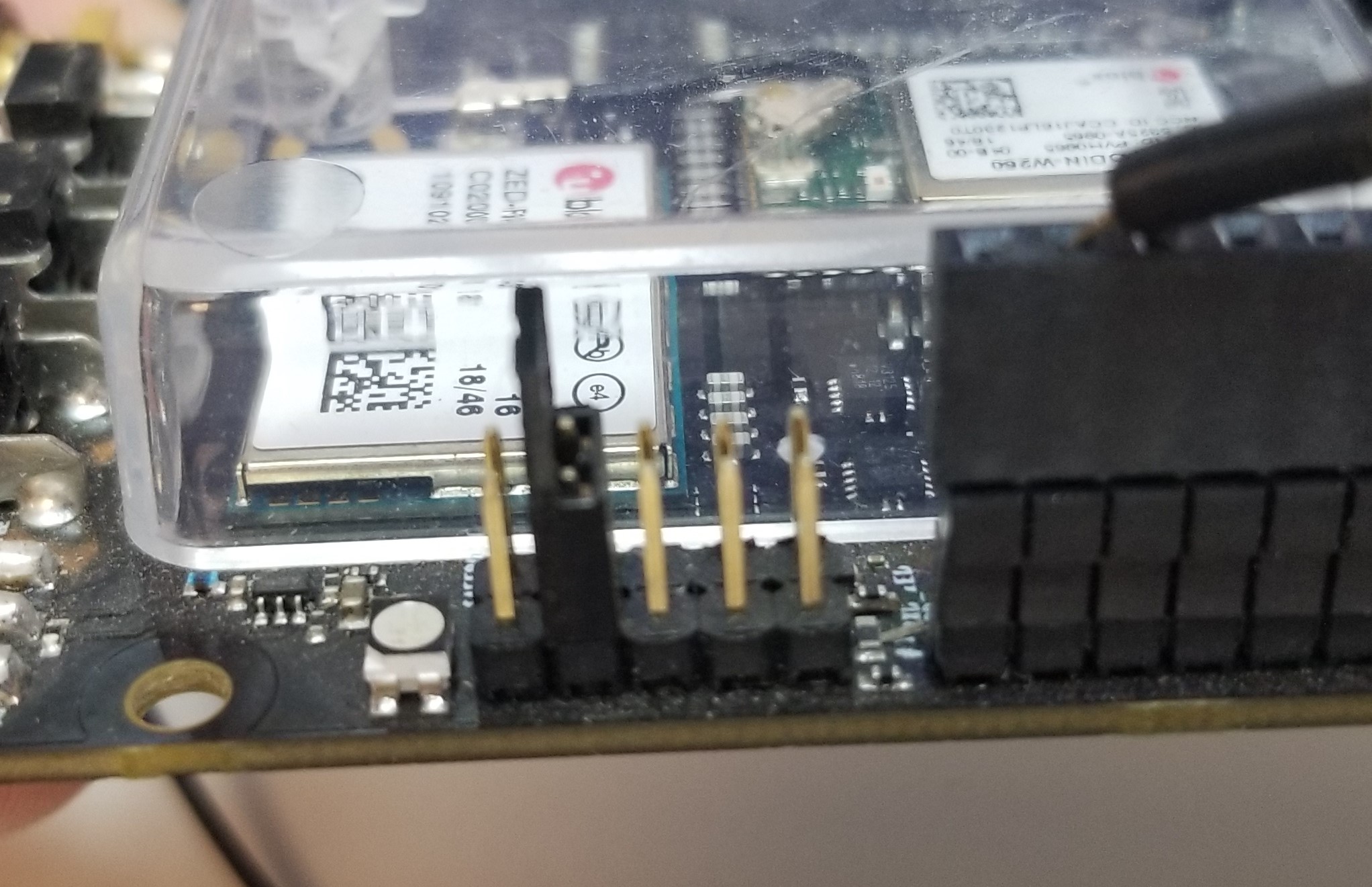
The Flight controller I’m attempting to use is the Matek F405-STD.
I’m using Mission Planner 1.3.70 build 1.3.7277.34800.
If I change the Flight Controller Firmware to use ArduPlane V4.0.5 (0bfa2638) then I can connect the Neo-6M, but NOT the intended target GPS (C099-F9P Application board).
My limited experience of Mission Planner and U-Center leads me to believe that even if there is a problem with ArduRover which you can point me to, or perhaps fix, I will still have some extra issues:
It appears from experimentation with the Neo-6M that the reason the C099-F9P will not connect to the Flight Controller is because the output from the C099-F9P is limited to NMEA Messages. Added to that, I am also dubious as to whether the Application board will respond like a normal Ublox GPS would to Automatic setup Messages from the Flight Controller.
I believe I have eliminated the possibility that signal levels are an issue (not 5V versus 3.3V) as they appear to measure the same as for the Neo-6M I.e. 3.3 Volt high and modulated to 0 Volts by data. Incidentally, I can’t actually find the signal levels required by the Matek.
When I try to make Neo-6M output NMEA, either it will not connect, or when it does connect it is because the Flight Controller has Automatically set it to 115200 baud and Set the protocol Output to UBX. (the baud rate isn’t an issue – but it is frustrating that I don’t even have control over that).
I have only found four settings, which I think, would seem to be pertinent:
Two settings in the Standard Params :
1 - Serial 3(GPS) Baud Rate (SERIAL3_BAUD) – which I’m leaving at 38400 – and is routinely ignored  .
.
2 - Serial 3 (GPS) protocol selection (SERIAL3_PROTOCOL) which I’m tending to leave at NMEA Output and again is ignored .
and two settings in the Advanced Params
3 - Automatic GPS configuration (GPS_AUTO_CONFIG) – obviously tried turning OFF or ON.
4 - GPStype (GPS_TYPE) - I’ve tried None, AUTO, uBlox and NMEA with a variety of changes to the other 3 settings with no joy achieving the configuration I would like I.e. Connecting and responding to NMEA Messages at (say) 115200 baud.
So to summarise, I would like to be able to set the Matek F405-STD to receive NMEA GPS Messages from a NEO-6M (baby steps) whilst using the ArduRover Firmware.
Connecting to the C099-F9P can be for a later day…
All the very best
Greg
PS
Some additional information, and one stage I “sniffed” the output from the Serial 3 TX line (with U-Center connected with a HDMI module) and found this in the U-Center – TEXT Console:
??:??:?? $PUBX,41,1,0023,0001,115200,0*1C
??:??:?? $PGCMD,16,0,0,0,0,0*6A
??:??:?? $PSRF100,0,38400,8,1,0*3C
Which, I think, appears to set the baud rate to 38400, then put the UART into Binary Mode, then set the baud rate to 115200.
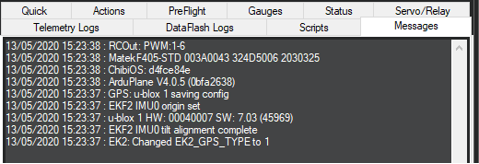
Here are two copies of the Mission Planner Messages window the first shows the result of manually changing the GPS_TYPE to AUTO
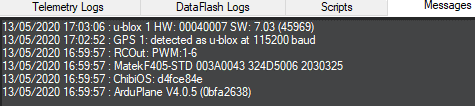
The second shows the Message Window at start up when the GPS UART is first detected: