Firmware - ArduCopter-4.0.4
Hardware - Omnibusf4pro
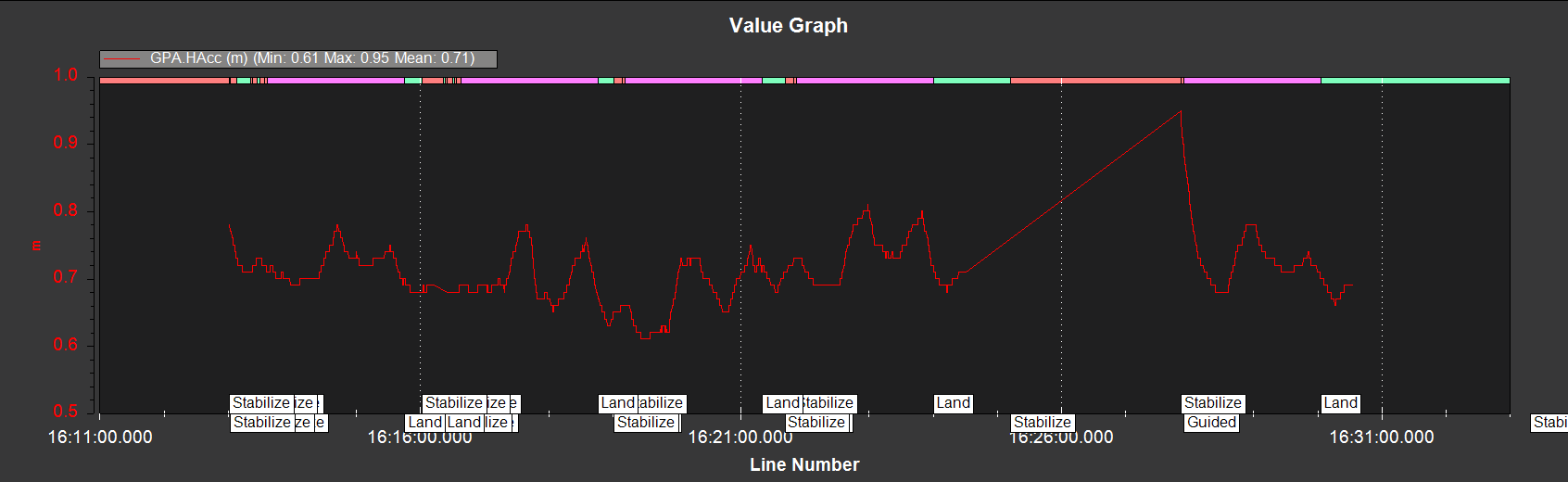
GPS - Here+ RTK (but flying in 3D fix without RTK setup)
Build - 5" props quadcopter
Issue:
Made multiple flights in guided mode which can be seen in the log below. In the first flight in guided mode, GPS position drifts to quite large extent, it should not be toilet bowling cause i have EK3_MAG_CAL set to 2 means quadcopter using simple heading fusion all the time. So i am confused who can be responsible for this drift, need help in diagnosing this large gps position drift which didn’t occured in next flights.
Log:
https://drive.google.com/file/d/1xIuClk69eQEtEgEFtnp8NC8HympD3psD/view?usp=sharing
Please overlook roll & pitch oscillations as i was sending new position command at every 2 second intervals in guided mode.