Hi,
After my last question was answered so quick and perfectly , i give it another try.
Probably i did some mistake in the configuration.
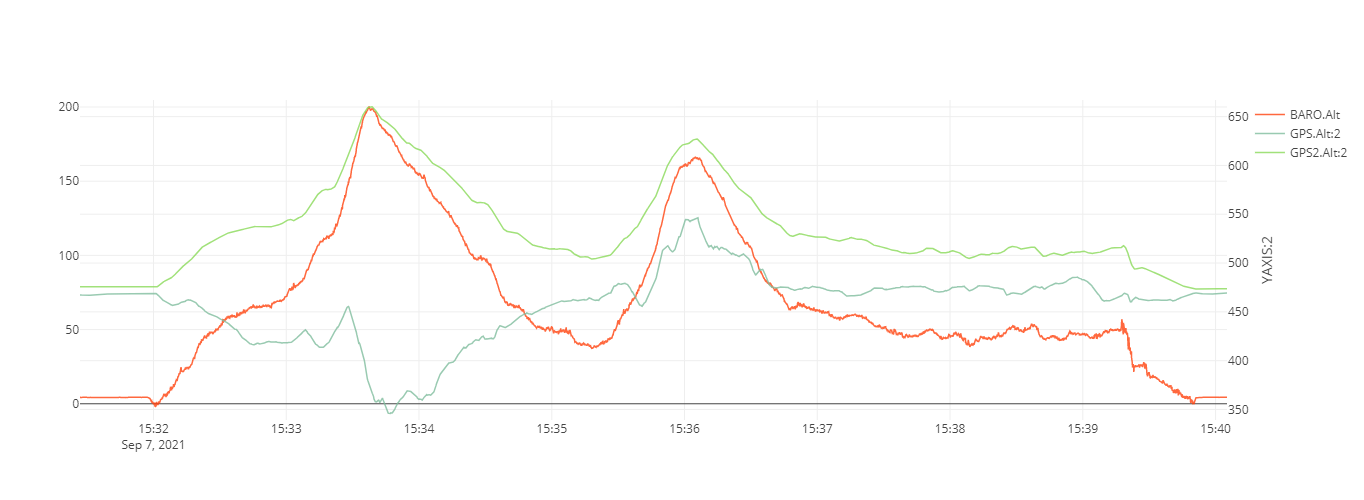
My colleaques and me experienced that the GPS altitude in our aircraft is negative during climbing. Of course this leads to a wrong Altitude update in the ardupilot.
The barometer works correctly, but the update from the GPS periodically creates altitude changes that are not correct.
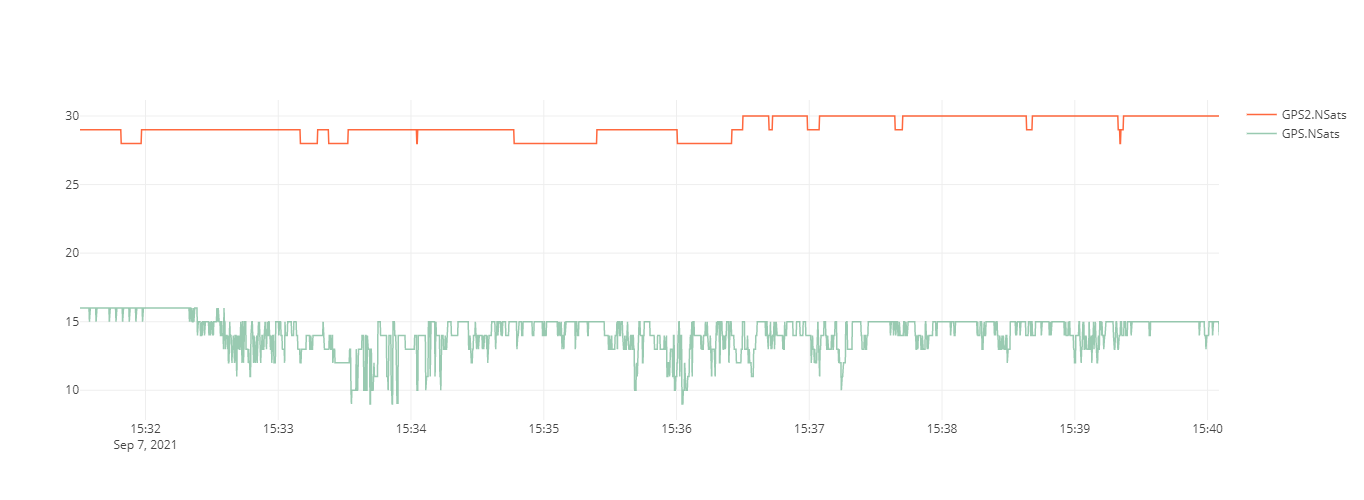
It is a mRo GPS u-Blox Neo-M8N. (via standard Serial/i2c)
To validate, we installed another GPS: Mateksys M9N-F4-3100 (via UAVCAN).
The new GPS gives the altitude correctly.
This can be seen in the log data easily: red is barometric altitude, green the new Mateksys GPS (correct values) and blue the incorrect mRO GPS data.
newplot (2)|690x252
newplot (3)|690x252
{kind=link}
{kind=link}
We can avoid this by just using the new GPS, but i would like to know the origin of the deviation for future projects.
We do have long unshielded cables (getting fixed currently), but i would expect more noise in the signal when a (sign) bit changes. We experienced this with airspeed i2c sensors, but it looked quite different.
Additionally, the ardupilot is currently only logging and not controlling the aircraft. We had the error in armed and disarmed state.
Any ideas where to look?
Unfortunately i cannot upload the complete log. If it is absolutely necessary i try to reproduce it with another aircraft that i can publish.
Thank you a lot!
-Christian