Now, I’m trying to make new plugin for mavros_extras. I want to make fake gps plugin like a “mocap_fake_gps.cpp”. I try to send message “GPS_INPUT message”.
This is my code to send GPS_INPUT. (I edited mocap_fake_gps.cpp line.135-149 )
gps_week_ms = 401400000 + (count * 200); //gps_week_sec 401400 (2016/12/1 15:30:00)
mavlink::common::msg::GPS_INPUT pos;
pos.time_usec = trans->header.stamp.toNSec() / 1000;
pos.gps_id = 2; //ID of the GPS for multiple GPS inputs
pos.ignore_flags = 1;
pos.time_week_ms = gps_week_ms;
pos.time_week = 1925; //2016-12-01 GPS week number
pos.fix_type = 3;
pos.lat = (lat_rad * 180 / M_PI) * 10000000;
pos.lon = (lon_rad * 180 / M_PI) * 10000000;
pos.alt = (408 - down) * 1000;
pos.hdop = 0.02;
pos.vdop = 0.02;
pos.vn = vn;
pos.ve = ve;
pos.vd = vd;
pos.speed_accuracy = 1;
pos.horiz_accuracy = 5;
pos.vert_accuracy = 3;
pos.satellites_visible = 6;
UAS_FCU(m_uas)->send_message_ignore_drop(pos);
And I publish rostopic “/mavros/fake_gps/fix”.
rostopic pub -r 5 /mavros/fake_gps/fix geometry_msgs/TransformStamped '{header: auto, child_frame_id: /body, transform: {translation: {x: 0, y: 0, z: 0}, rotation: {x: 0, y: 0, z: 0, w: 1}}}'
I set parameter.
GPS_TYPE,14 SERIAL2_BAUD,57 SERIAL2_PROTOCOL,1
but I can’t find this parameter on Erle Brain 2.
BRD_SER2_RTSCTS,0
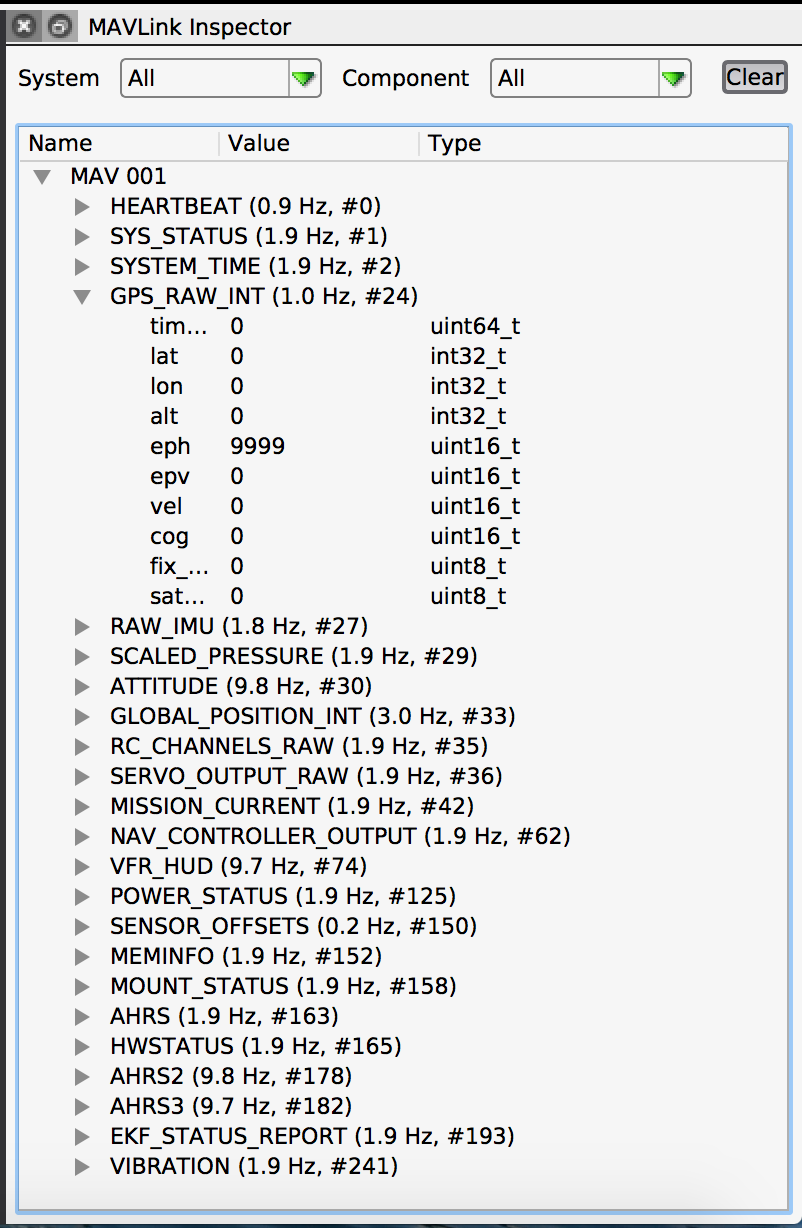
I can’t see the GPS_INPUT message (using APM Planner 2)
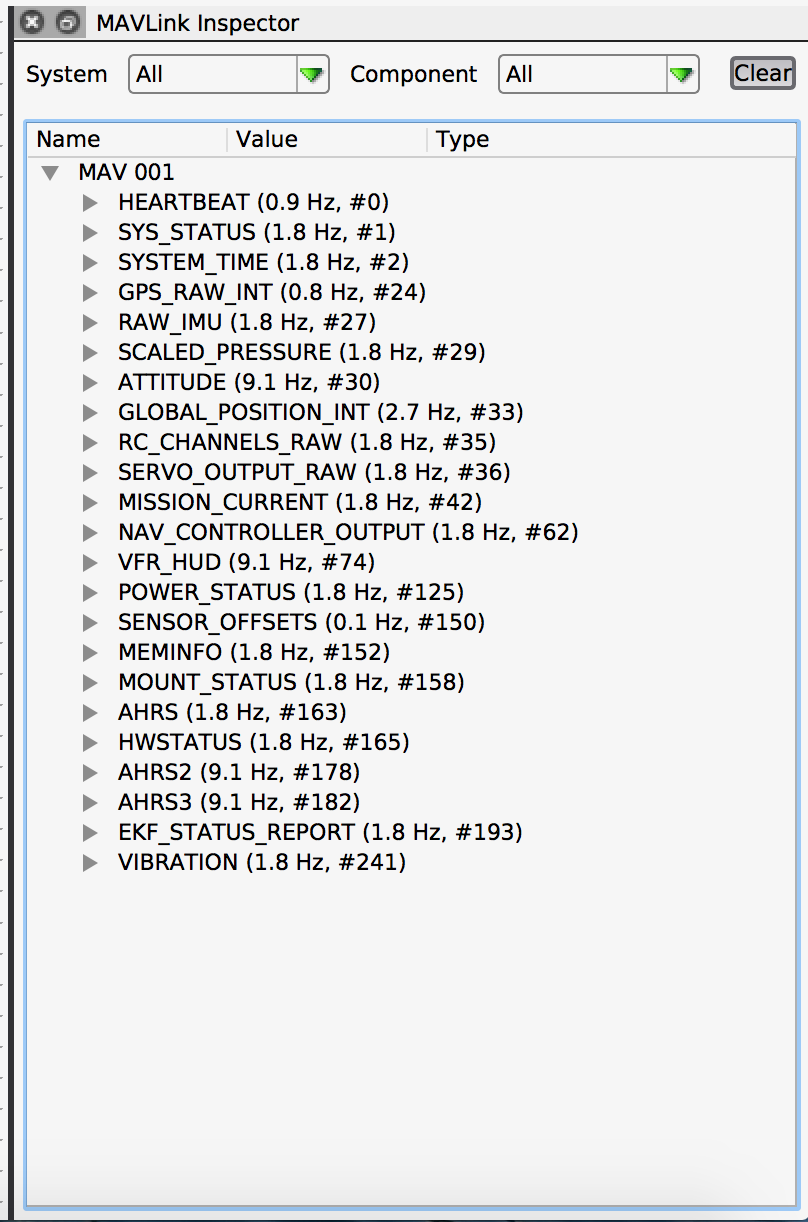
What’s wrong my code? or APM can’t use GPS_INPUT ?
My Hardware Type is Erle Brain 2 (ErleCopter)
http://docs.erlerobotics.com/brains/erle-brain-2
Thanks