I just got a new GPS module (Radiolink SE100) and it appears the current/target heading is slightly off. I was about to say its pointing to the left about 35 degrees, but then I looked again and it changed to about 35 degrees to the right. It said that it had obtained 13 satellites and it had been about 10 minutes. (It only took about 30 seconds to get 13 though, it had been sitting fr a while in my house.) Is this a problem that needs to be fixed? It shows it following where I point it, just about 35 degrees off.
Also, now that I plugged this new one in, the compass appears to have it’s roll backwards. (Tilting left it shows to the right, tilting right it shows to the left). I was also wondering how to fix this?
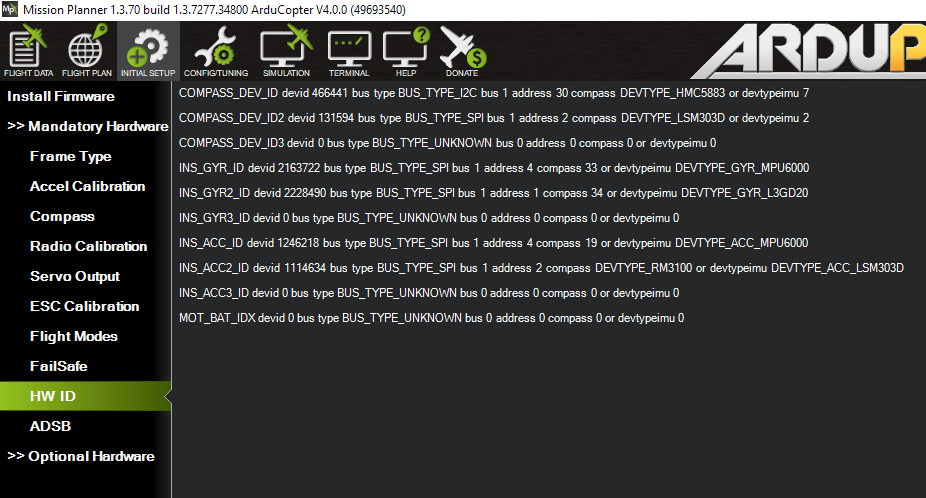
The heading has nothing to to with GPS, it’s the compass. And the compass has nothing to do with pitch and roll. Post the parameter file and also a screen shot from Mission Planners HW ID screen.
The extrernal compass is being recognized and I assume you have done a new compass calibration since installing the new one? I’m not sure what you mean by compass roll. It doesn’t cointribute to roll only yaw direction. You should update Arducopter to latest stable (4.0.3)
I have done a new calibration, that is all set. What I mean is when the drone tilts left, it thinks it is tilting right, and when it tilts to the right, it thinks it is tilting to the left. Also, I just installed the update, and the GPS is spot on right now, thanks! The tilting left and right is just backwards, what’s the best way to fix that? All the other directions are fine.
And the GPS is back to being off a little. Though not as much, still a little. It was spot on for a little bit though. As I speak its varying between being perfect and a little off, is that a concern?
I haven’t been able to try flying it since the weather hasn’t been good, but when I look at the flight data tab in Mission Planner, everything this box is correct except when I tilt it left and right, its backwards. If the weather cooperates tomorrow I will test it, but i’m not confident the roll will be correct.
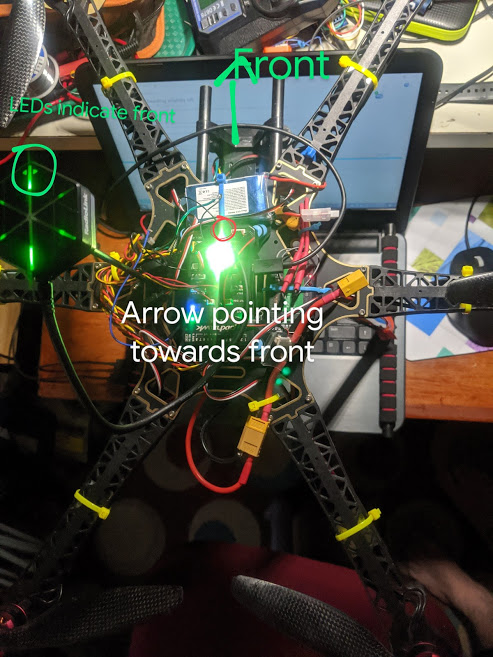
I think what @LucasC means is that the gyro is sending data as if it is inversed (ie when he titlts the craft one way, the algorithm thinks its going the other way). How have you mounted the flight controler? What is it? Ensure that the front of the controller is pointing towards the front of the vehicle, and ensure the GPS / compass module is facing directly toward the front of the craft and is alinged with the direction of the FC.
Yes that is what I mean, both the fc and the module are mounted normally and the arrow on the Pixhawk is pointing toward the front. Also, the green LEDs on the module also show it pointing in the correct direction, I also looked at the manual for the module to make sure. I had it running before just fine, but I changed the external compass/GPS and now the rolling is inversed and the GPS is a little off. It still moves when I move it the correct amount, but its off about 35 degrees one way or the other, it switches which side is a little off.
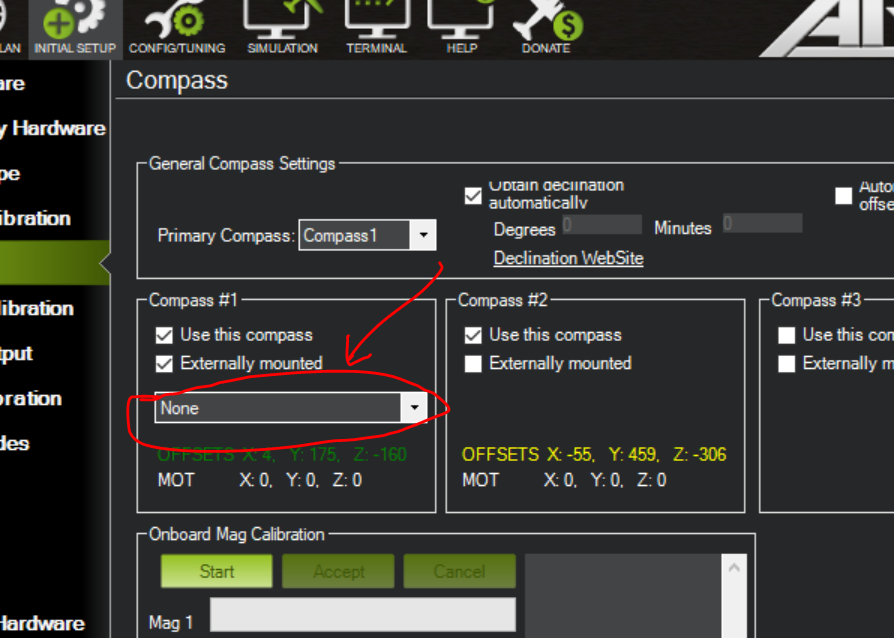
Have you checked the AHRS and external compass rotation parameters? ensure that they are both set to none if they are both pointing forward.
I’m pretty sure the issue here is that the external compass is mounted / being read as if it was mounted backwards. Hence the gps error and the inverse roll.
[edit] if it works with no external compass, then the AHRS rotation params should be in order. check the GPS / external compass rotation parameters, and try mouting the gps backwards and see if it works… (dont fly it, just check if the roll is inverse or not)
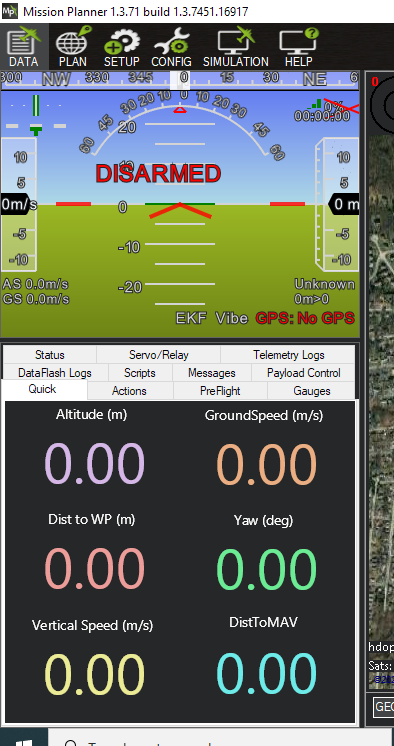
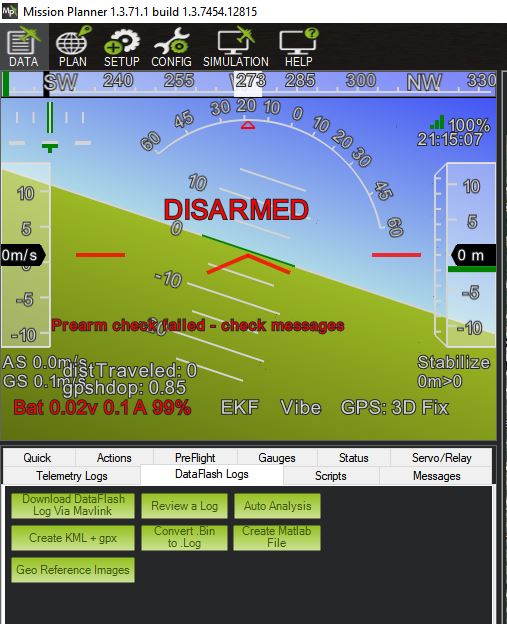
I’ll try one more time. Does your craft behave the same as what’s shown in the HUD screen shot when it’s rolled left, yes or no? If yes there is nothing wrong.
And again the compass settings have nothing to do with the attitide (pitch/roll) of the craft.
And it’s not the gyro’s that are producing the pitch and roll in the HUD display it’s the accelerometers.
And for anyone else trying to help here his parameter file is attached. The answers to the questions you are asking are right there.
How is a “GPS error” related to the “inverse roll” if that is even present?
If that would help to get some useful feedback here in order to determine a problem, if one exixits, I am all for that!
I just realized I’m a buffoon. The HUD is correct, I was just not realizing it, sorry for the confusion. However the GPS is still slightly off. What should I do about that?
 this is a fun conversation. I am confused like u…
this is a fun conversation. I am confused like u…