Goof afternoon,
We were trying today in a ground test multiple sources and came up with the following scenario. We let the system acquired RTK fixed, then we cover the rover GPS with an aluminum sheet for making the system to lose signal. Eventually, it lost RTK fixed but we started to receive the message GPS glitching:
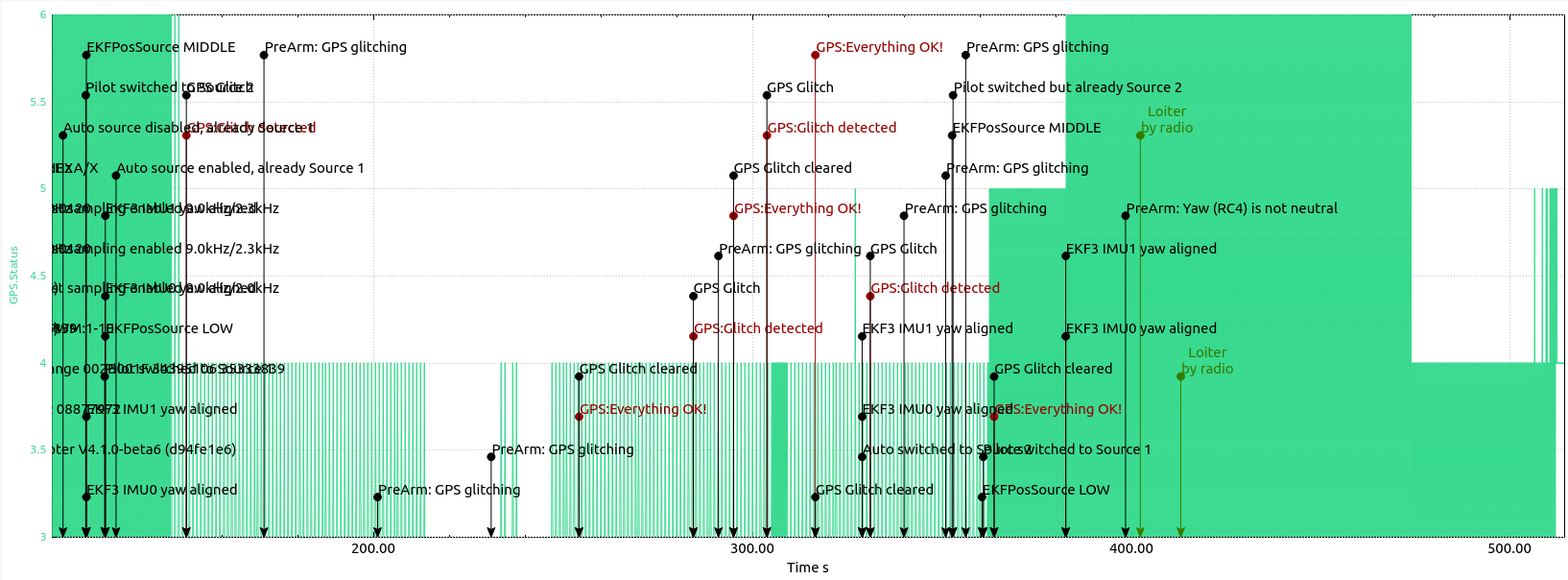
It is odd since we have done this same test covering the base GPS instead of the rover one and the vehicle still has valid position. Form the plot, which may be not that clear since APM planner plots both GPS in the same line, it looks like there is a downsamplig in the GPS information; a plot of the received instance show lees information after we cover the rover:

If the GPS is glitching, it may be dangerous to use the position and of course it will let us arm. Please find the log in the link below: