I’ve pass the fly_gps_glitch_loiter_test from autotest arducopter suite, on a SITL running in local mode. This test, applies 5 gps glitches, using de SIM_GPS_GLITCH_* param.
I am trying to detect the effects of the glitches analyzing records from tlogs, but I don’t know which value I must check out.
Regarding Ardupilot wiki “Diagnosing problems using Logs” (gps glitches topic):
Also, I’ve checked Youtubes “GPS Glitch Protection” video from @rmackay9, and he speaks about a three-dimension GPS position value (GPS , actual and inertial ¿may these values be helpful?one).¿Are these values provided on tlogs?
Anyway, when I ran the same test, the distance variations are 1 at most …
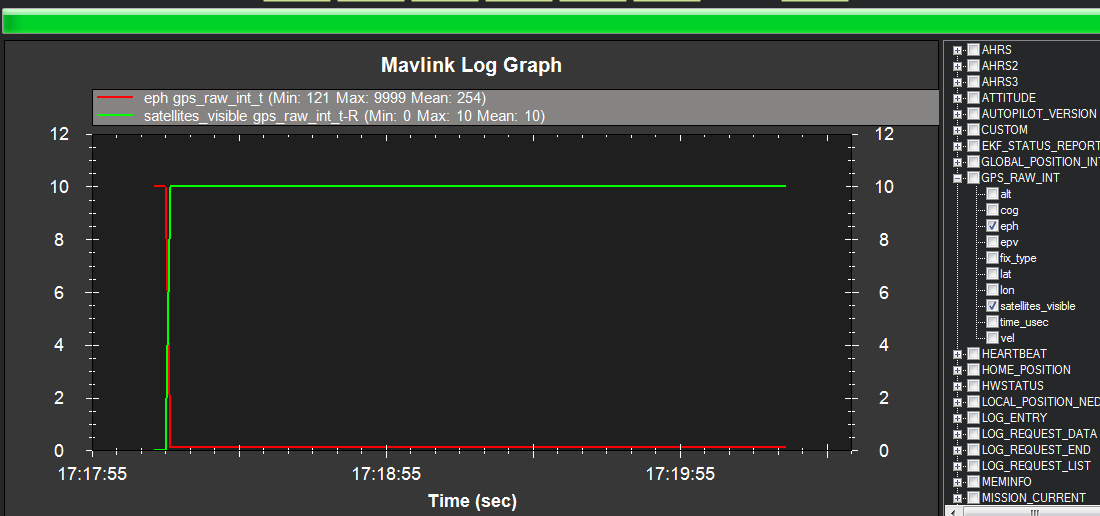
I haven’t tested this, but you probably want to look at the reported location from GPS and the position reported by the EKF. From your picture you are looking at a MAVLink log instead of a dataflash log, so I think the relevant messages are GPS_RAW_INT and GLOBAL_POSITION_INT.
If I look into source code, to compare positions before/after glitches, SIMSTATE is used. ¿May be on simulation mode, others params doen’t works? Anyway, SIMSTATE values are regular, but during the the test simulation, the “blue” dron goes away for a while, but i dont know which values are feeding it.
I,ve read about a EKF estimator that prevents from glitches. Perhaps if it was possible to deactivate I could see more changes. ¿do you know if its possible via flags?
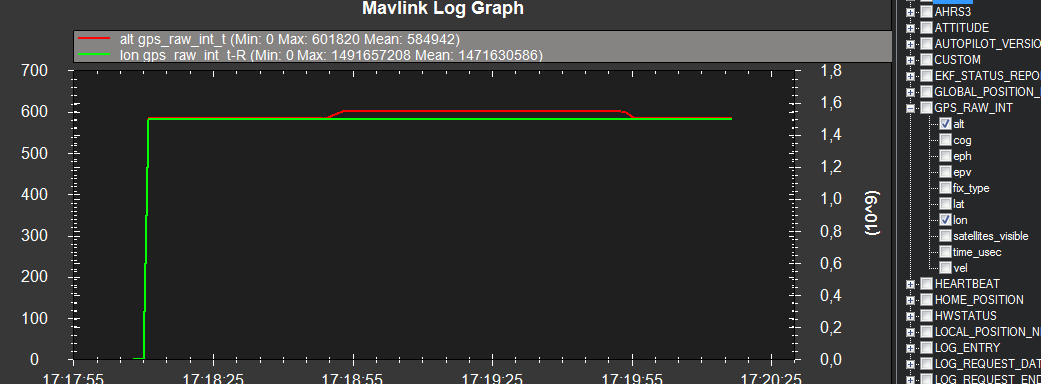
It is quite hard to see if there is any change in longitude when it starts with 0. Zoom in, removing the part with the 0 and graph should more clearly show how it changes.
Thanks @OXINARF. I’m trying now with another kind of simulation , using the SIM_WIND param.
Take a look to Detecting turbulences/bounces via tlogs whenever you can.
I’ll appreciate any feedback from you.